

Coraz większa liczba aplikacji zabezpieczeń i sterowania w stacjach elektroenergetycznych zaczyna wykorzystywać Ethernet jako podstawowy kanał komunikacyjny. W związku z tym należy założyć, że Ethernet stanie się głównym medium komunikacyjnym dla przyszłych stacji, nie tylko na poziomie transmisji, ale usług skojarzonych takich jak np. precyzyjna synchronizacja czasu.
Cyfrowe stacje wymagają czasowo optymalizowanej architektury sieciowej, która w pełni zintegruje wszystkie elementy systemu automatyki IEC 61850. Pod pojęciem optymalizacji w dziedzinie czasu kryje się, krytyczność opóźnień i fluktuacji pakietów, ale również, a może przede wszystkim zdolność sieci do przenoszenia precyzyjnej synchronizacji czasu. Wiele aplikacji IEC 61850 wymaga wysokiej dokładności synchronizacji czasu oraz szybkiej, a nawet bezstratnej redundancji komunikacyjnej, aby działać poprawnie i osiągnąć poziom niezawodności wymagany w energetyce.
Biorąc pod uwagę koszty i niezawodność systemów pomiarów opartych na rozproszonych odbiornikach Global Navigation Satellite Systems (GNSS) wskazane jest, aby jednostki dystrybucji stosowały mniej rozproszonych odbiorników GNSS i zdecydowały się na wdrożenie bardziej niezawodnych i solidnych scentralizowanych systemów dystrybucji czasu z różnymi źródłami danych wejściowych i algorytmami walidacji. Pozwoli to rozwiązać problemy z jakością synchronizacji czasu, utrzymaniem sieci synchronizacji i odpornością na zakłócenia typu „jamming” czy „spoofing”. Zakładając, że dostępne jest precyzyjne i scentralizowane źródło czasu na stacji, niezawodna i dokładna dystrybucja czasu będzie kluczowa dla poprawnej pracy krytycznych aplikacji kontrolno-pomiarowych wymagających dokładności czasowej nie gorszej niż ±1 μs.
Pod względem kosztów, złożoności i niezawodności w porównaniu z różnymi dostępnymi metodami synchronizacji czasu, Precision Time Protocol (PTP) zdefiniowany w standardzie IEEE1588 v2.1 jest dobrym kandydatem do rozwiązania problemów synchronizacji na stacjach elektroenergetycznych.
Niniejszy artykuł stanowi wprowadzenie do IEEE 1588 v2.1 i dostarcza wiedzy ogólnej z zagadnień aplikacji precyzyjnej synchronizacji czasu. Poruszone zostały też ogólne wymagania dla czasu precyzyjnego w aplikacjach stacyjnych.
IEEE 1588 - wprowadzenie
Obecnie obowiązujący standard IEEE 1588 v2.1: 2019 (poprzednia wersja IEEE1588 v.2.0:2008) określa drugą generację Precision Time Protocol znaną również jako PTPv2.1 lub 1588v2.1. Standard PTP daje możliwość uzyskania bardzo dokładnej synchronizacji czasu za pomocą urządzeń Ethernetowych (typowo przełączników), dzięki przetwarzaniu sprzętowo-programowym dokładnego czasu i komunikatów PTP. Przetwarzanie sprzętowe ze wsparciem programowym, może kompensować niepewność wprowadzoną przez systemy operacyjne czasu rzeczywistego i inne opóźnienia powstałe w procesie synchronizacji w urządzeniach dystrybucji synchronizacji jak i w urządzeniach, które są synchronizowane. Ogromną zaletą drugiej wersji PTP jest brak wpływu na działanie innych protokołów pracujących w sieci Ethernet oraz ograniczenie obciążeń procesora. W rezultacie jest możliwa jego dystrybucja z innymi czasowo wrażliwymi protokołami stacyjnymi jak Generic Object Oriented Substation Event (GOOSE), Sampled Values (SV), Phasor Measurement Units (PMU) i innymi protokołami automatyzacji stacji. Ważne podczas budowy stacji jest wyposażenie przełączników Ethernetowych w pełne sprzętowe wsparcie dla PTP wraz wymaganymi profilami tj. co najmniej Power Profile – IEEE C37.238 oraz IEC 61850-9-3 dostępne tylko w najwyżej klasie przełączników.
PTP wspiera obsługę wielu zegarów typu Master Clock (MC), dzięki czemu urządzenia mają możliwość wyboru najlepszego zegara Grand Master Clock (GMC) poprzez algorytm Best Master Clock Algorithm (BMCA). W przypadku obniżenia jakości zegara wybranego jako główny, w czasie rzeczywistym możliwe jest automatyczne wybranie innego zegara, który będzie pełnił funkcję nowego GMC dla odbiornika z lepszą dokładnością, niż poprzedni do czasu odzyskania przez niego zdolności synchronizacyjnych na poprzednim poziomie.
Jedną z głównych cech PTP jest jego elastyczność, ponieważ może być wykorzystywany do wielu zastosowań związanych z synchronizacją czasu z dokładnością poniżej 1 μs.
Założeniami PTP jest osiągnięcie:
• nanosekundowej dokładności dystrybucji czasu,
• zminimalizowanie zasobów procesora kosztem wsparcia sprzętu,
• wdrożenie precyzyjnej synchronizacji w sieciach danych,
• obsługa zegarów o różnych możliwościach, takich jak precyzja, dokładność i stabilność.
IEEE 1588 PTP jest wykorzystywany w wielu obszarach, takich m.in. jak telekomunikacja, automatyka przemysłowa, automatyka stacyjna, sieci audio i wideo, giełda oraz specyficzne projekty IoT. Jedną z kluczowych zalet jest to, że IEEE 1588 może być dystrybuowany przez przewodowy, ale również i radiowy Ethernet: nie wymaga dodatkowej sieci dystrybucji czasu i pozwala uniknąć konieczności instalowania dziesiątek czy setek odbiorników GNSS skojarzonych z jednostkami wymagającymi czasu precyzyjnego. Jednocześnie PTP jest dokładniejszy, niż Network Time Protocol (NTP), ponieważ PTP może zapewnić dokładność nanosekundową za pomocą sprzętowego wsparcia znakowania czasu. Doskonale zatem nadaje się do zastosowania dla aplikacji stacyjnych. W Tabeli 1 podsumowano charakterystykę różnych metod synchronizacji dostępnych obecnie w stacjach elektroenergetycznych.
Tabela 1: Porównanie różnych metod synchronizacji czasu na stacji elektroenergetycznej

Rodzaje zegarów
Dla standardu PTP zdefiniowane są cztery główne typy urządzeń, mianowicie Ordinary Clock (OC), Transparent Clock (TC) i Boundary Clock (BC) oraz wspomniany Master Clock. Zegary te współpracują ze sobą w celu dystrybucji bardzo dokładnych komunikatów synchronizacyjnych w całej strukturze czasowej.
Ordinary slave clock (OSC) to urządzenie synchronizowane z czasu precyzyjnego PTP. Zachowuje on skalę czasu w domenie PTP i synchronizuje się do niej w celu dalszej synchronizacji obwodów wewnętrznych zależnych od aplikacji. Dla aplikacji może oferować skalę czasu w postaci znacznika i/lub sygnału Pulse Per Second (PPS). Niedokładność synchronizacji, jaką może oferować OSC będzie zależna od obwodów wewnętrznych i klasy lokalnego oscylatora. Istnieje możliwość użycia Synchronicznego Ethernetu dla poprawy parametrów synchronizacji oscylatora lokalnego, jeśli taka funkcjonalność jest wspierana.
Transparent Clock (TC) Komunikaty PTP w systemach komunikacyjnych przesyłane są poprzez przełączniki i routery z pewnym opóźnieniem. Rolą TC jest dokładne zmierzenie opóźnienia przełączania i dodanie tej informacji do komunikatu PTP.
Przełączniki TC można skonfigurować na dwa sposoby: TC End-to-End (E2E) lub TC Peer-to-Peer (P2P) w zależności od zastosowanego mechanizmu pomiaru opóźnienia. Jeśli zegar działa w trybie E2E czas przebywania jest dodawany do pola korekcji docelowego komunikatu PTP. Z kolei P2P TC komunikuje się również z urządzeniem poprzedzającym (od strony MC) do którego wysyła komunikaty PTP Peer w celu uzyskania informacji o opóźnieniu połączenia, która dodawana jest do pól korekcyjnych wraz z czasem przebywania pakietów PTP. Dla aplikacji stacyjnych w wymaganych profilach wymagany jest tryb kalkulacji opóźnień P2P. Nie jest możliwa praca inteligentnych urządzeń stacyjnych z trybem E2E, który jest zdefiniowany w aplikacjach telekomunikacyjnych np. ITU-T G.8275.1 Telecom Profile. Przy wyborze sprzętu dedykowanego dla rozwiązań stacyjnych należy zatem dokładnie sprawdzić możliwości PTP w urządzeniu. Późniejsza korekta mechanizmu kalkulacji opóźnień przez wymianę oprogramowania może okazać się kłopotliwa lub niemożliwa bez wymiany sprzętu.
Boundary clock (BC) składa się z OSC i MC rozdzielonych wewnętrznymi obwodami synchronizacji czasu i częstotliwości (obwody oscylatora lokalnego). Całość zaimplementowana w przełączniku sieciowym pozwala na automatyczne wykrycie strony zegarów nadrzędnych i poprzez algorytm BMCA wybranie najlepszego źródła. Na wyznaczonym przez algorytm BMCA porcie przełącznika automatycznie ustawiana jest funkcja OSC, a reszta portów konfiguruje się automatycznie tryb MC. W rezultacie BC dzielą obszar synchronizacji na różne segmenty lub subdomeny, a każda z nich może mieć w pewnym zakresie odmienne ustawienia konfiguracyjne. Podobnie jak w przypadku TC kalkulacja opóźnień może odbywać się w trybie E2E i P2P. Dla aplikacji stacyjnych wymagany jest tryb kalkulacji opóźnienia P2P. Przy okazji konfiguracji BC i aplikacji stacyjnych należy wspomnieć, że wymagane jest wsparcie określonych profili np. takich jak IEEE C37.238 oraz IEC 61850-9-3.
Rysunek 1. Przykładowa sieć synchronizacji PTP w oparciu o rozwiązania Bitstream

Jak przedstawiono na Rysunku 1 sieć synchronizacji czasu może wspierać dowolne topologie połączeń. Mechanizm wyboru najlepszego zegara będzie czuwał na prawidłowym wyborem trasy synchronizacji i przełączeniem ścieżki do najlepszego źródła. Struktura może być wielopoziomowa i obejmować heterogeniczne łącza transmisji (skrętka, światłowód czy radio WiFi). W przypadku braku bezpośredniego wsparcia protokołu PTP w urządzeniach końcowych można je zsynchronizować z urządzeń pośredniczących w łańcuchu PTP wyposażonych w odpowiednie wyjścia np. PPS - synchronizacja i zegar 10MHz - syntonizacja. Węzeł taki musi pełnić role OSC lub BC, aby być zdolnym do wystawienia odpowiednich sygnałów. Ważną rolę w tak rozbudowanej sieci pełni system nadzoru lub też monitorowania jakości synchronizacji. Dlatego, jeśli serwery czasu i elementy węzłowe pochodzą od jednego producenta będą wyposażone w spójny system konfiguracji i nadzoru ułatwi to utrzymanie takiej infrastruktury.
Rysunek 2 przedstawia metodę kalkulacji opóźnień dla konfiguracji P2P wymaganej w energetyce automatyce przemysłowej czy sieciach audio video. Przedstawiona wymiana komunikatów odnosi się do trybu One Step, co będzie poruszone w dalszej części artykułu.
Rysunek 2. Przykładowa kalkulacja opóźnień w trybie P2P (One Step)
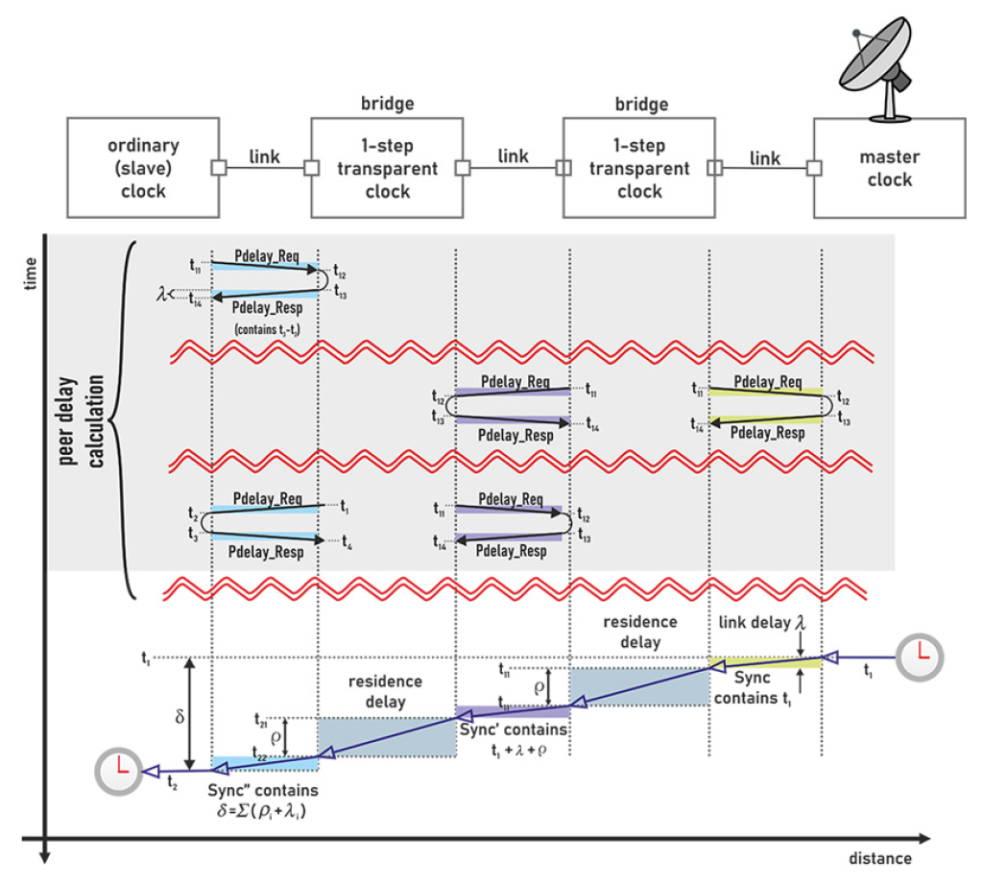
Jak jest przedstawione na Rysunku 2, komunikat Sync opatrzony znacznikiem czasu precyzyjnego jest dystrybuowany poprzez dwa węzły (przełączniki) pracujące w trybie TC. Każdy z nich na podstawie wymiany komunikatów Pdelay_Req (Peer Delay Request) i Pdelay_Res (Peer Delay Response) pomiędzy węzłami ma za zadanie ustalić opóźnienie łączy – Link Delay. Urządzenia TC określają również właśnie opóźnienie propagacji Residence Delay. Każdy węzeł uwzględnia obliczone opóźnienia w komunikacie SynC. Na końcu procesu odbiornik uwzględnia ostatnie opóźnienie toru.
Synchronizacja odbiornika i sieci IEEE 1588v2
Opisując ogólnie proces synchronizacji sieci i urządzeń poprzez protokół IEEE 1588 v2.1 składa się on z kilku etapów jak poniżej:
1. Ustanowienie hierarchii Master-Slave: decydowanie o roli i stanie każdego portu wszystkich Boundary Clocks i Ordinary Clocks poprzez wykorzystanie mechanizmu BMCA.
2. Synchronizacja: zegar Grandmaster zaczyna synchronizować zegary podrzędne.
3. Pomiar opóźnień dla węzłów sieci skonfigurowanych w tryb P2P lub określenie opóźnienia pomiędzy urządzeniem Master i Slave w trybie E2E.
4. Synchronizacja węzłów Boundary Clocks i Ordinary Slave Clocks.
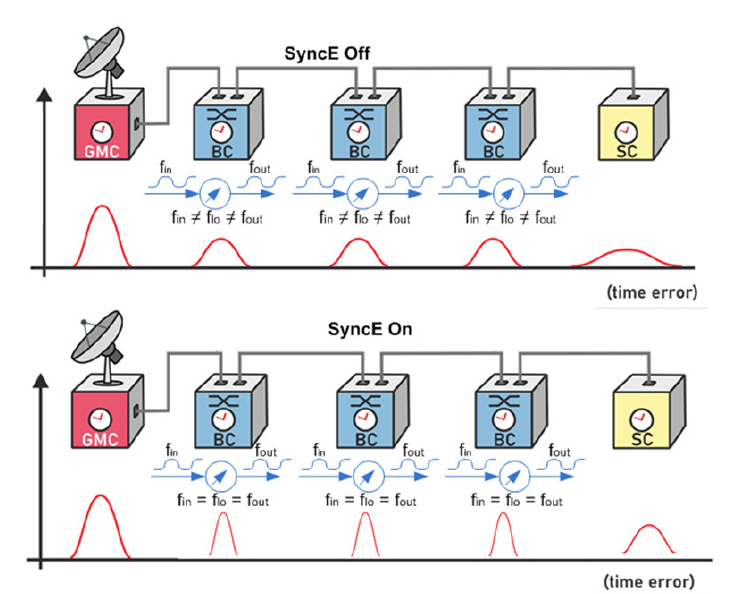
Synchronizacja węzłów OSC i BC będzie przebiegała etapowo. Typowo w takich urządzeniach wbudowane są układy automatycznej regulacji dostrajające czas wewnętrzny. Regulator zazwyczaj próbuje dostroić częstotliwość, a w kolejnym etapie zajmuje się precyzyjnym dostrojeniem fazy (czasu). W zależności od ustawień członów inercyjnych regulatora czas dostrojenia fazy może sięgać kilku minut. Dostrojenie fazy będzie wrażliwe na zmiany częstotliwości oscylatora lokalnego stąd jest to ważny element urządzenia OSC lub BC. Poprawę synchronizacji czasu PTP możemy osiągnąć poprzez synchronizację obwodów częstotliwościowych z wykorzystaniem Synchronicznego Ethernetu (SyncE) specyfikowanego poprzez ITU-T G.8261, ITU-T G.8262 i ITU-T G.8264, co pokazano na Rysunku 3. W takim wypadku synchronizacja częstotliwości następuje z wykorzystaniem warstwy fizycznej Ethernet, a PTP zajmuje się dostrojeniem fazy OSC. Kombinacja tych dwóch metod jest nieodłączna w sieciach telekomunikacyjnych natomiast z nieznanych powodów rzadziej w sieciach automatyki.
Rysunek 3. Wykorzystanie Synchronicznego Ethernetu do poprawy działania urządzeń BC z PTP.
Best Master Clock Algorithm
BMCA jest algorytmem podejmowania decyzji stosowanym do wszystkich węzłów obsługujących funkcję synchronizacji zegara czyli posiadających OSC. Port na zegarze Ordinary Slave Clock ma dwa możliwe stany podstawowe: tj. Slave i dla BC Slave i Master. Stanów, które może przyjmować port urządzenia OSC czy BC jest oczywiście wiele więcej. Wtedy określają one stany przejściowe lub stany awaryjne. Nie mniej jednak w zależności od ustawień konfiguracji i decyzji BMCA w przypadku dostępności Master Clock podejmowana jest finalnie decyzja o stanie portu jako odbiorczego typu Slave lub jako synchronizującego typu Master. Urządzenia TC nie synchronizują obwodów wewnętrznych i przesyłają tylko wiadomości PTP i przetwarzają znaczniki czasu dla wybranych komunikatów, więc nie stosuje się w nich algorytmu BMCA i nie ma zdefiniowanych stanów portów jak wspomniano wyżej.
Master Clock z określonym dla profilu czasem rozsyła informacje o właściwościach zegara do sieci za pomocą komunikatów Announce. Zmiana Mastera i zainicjowanie BMCA może zostać wywołane przez brak wiadomości Announce od istniejącego Grandmastera przez pewien czas. Proces ten może być również uruchamiany automatycznie, gdy aktywny Master ulegnie degradacji (brak sygnału GNSS) lub do sieci zostanie podłączony inny węzeł z lepszym zegarem. BMCA wykorzystuje zestaw danych z Announce, aby zdecydować, który Master ma najlepszą dokładność lub użytkownik nadał mu najwyższy priorytet, aby mógł zostać wybrany jako Grandmaster. Dane do podejmowania decyzji są wymienione poniżej, w kolejności priorytetów:
1. Priority 1: jest to ustawienie zdefiniowane przez użytkownika, które można skonfigurować w zakresie od 0 do 255. Niższe wartości mają pierwszeństwo. Został on zaprojektowany jako najwyższy na liście po to, aby ominąć resztę porównań BMCA i przyspieszyć wykonanie, a także dać użytkownikom swobodę w zakresie ustawień zegara.
2. Klasa zegara (ClockClass) (stan synchronizacji do zegara atomowego): wartość ClockClass, co oznacza możliwość śledzenia czasu lub częstotliwości czyli innymi słowy stanu zegara. Wartość 6 oznacza synchronizację do czasu atomowego. Im większa wartość, tym gorsza klasa. ClockClass o wartości255 jest używana dla zegarów podrzędnych nie synchronizujących w łańcuchu PTP urządzeń dalszych.
3. Dokładność zegara: jest to wartość wyliczeniowa szacowana przez zegar na podstawie atrybutu źródła czasu i zdolności samego zegara do podtrzymania.
4. Odchylenie zegara (offsetScaledLogVariance): Jest to wartość statystyczna skali logarytmicznej reprezentująca dokładność znacznika czasu, gdy nie jest on zsynchronizowany przez PTP na podstawie algorytmu określonego w PTPv2 (BC).
5. Priority 2: Jest to kolejne ustawienie priorytetu przez użytkownika, podobne do Priority 1. Jeśli istnieją dwa identyczne zegary z funkcją Grandmaster to ustawienie może być użyte do wybrania preferowanego Mastera.
6. Identyfikacja zegara (GrandMasterID): zmodyfikowana wartość adresu MAC zegara, która jest unikalną wartością dla każdego zegara w sieci LAN.
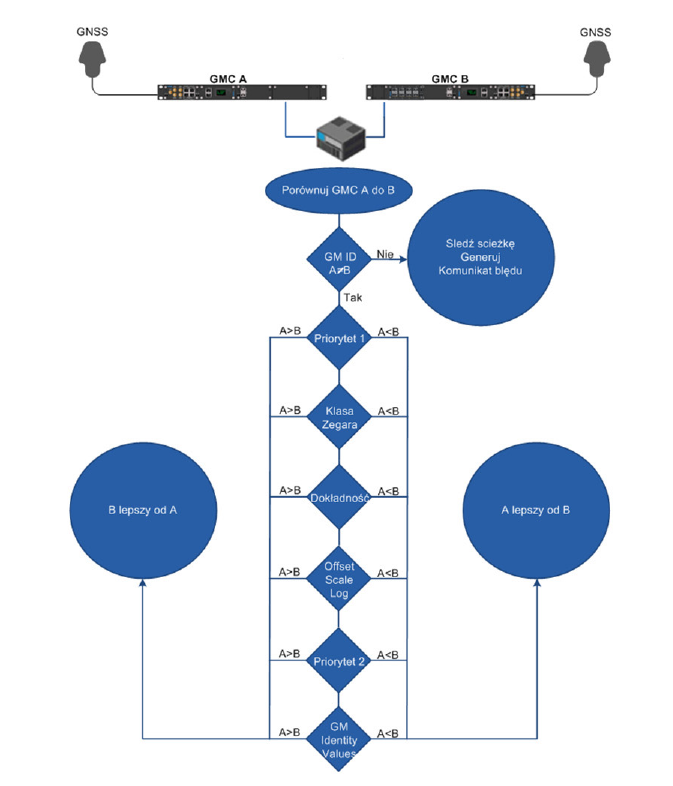
Może się zdarzyć, że komunikaty z Grand Master Clock trafią różnymi drogami do urządzenia Ordinary Clock. W takim wypadku algorytm BMCA przechodzi w tryb określania ścieżki synchronizacji i analizuje szereg innych informacji, aby podjąć decyzję o stanie portu i komunikacie błędu. Rysunek 4 przedstawia uproszczony algorytm BMCA.
Rysunek 4. Metoda wyboru lepszego zegara BMCA
Two step i One step
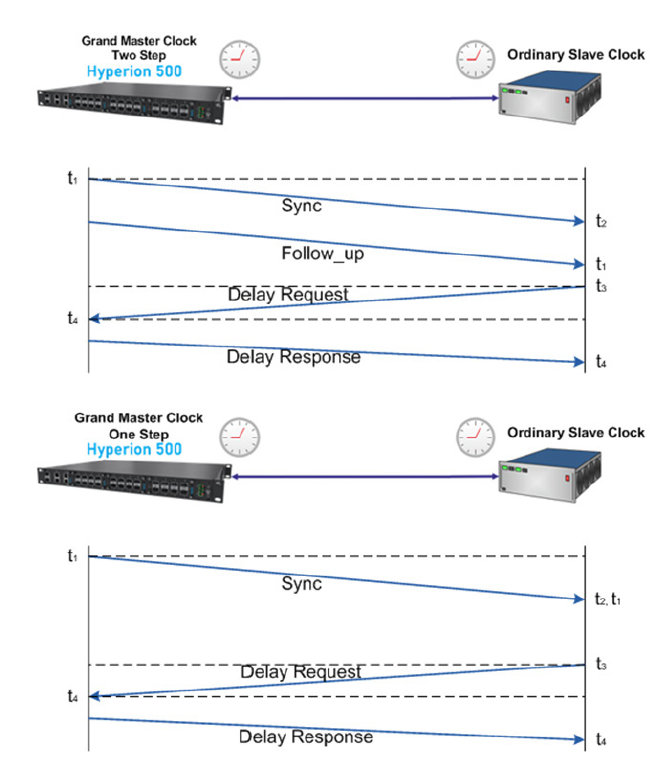
Dla każdego rodzaju węzła PTP zdefiniowane zostały dwie metody przesyłania znacznika czasu tj. One Step i Two Step. Zdefiniowanie dwóch metod przesyłania znaczników z czasem precyzyjnym wynikła z rozwoju możliwości sprzętowych urządzeń sieciowych we wspieraniu komunikatów PTP. W pierwszych rozwiązaniach trudna do osiągniecia okazała się funkcja pobierania czasu rzeczywistego z wewnętrznych obwodów w urządzeniu Master Clock w trakcie generowania ramek Sync niosących znacznik czasu. Zdecydowano się więc na dodanie ogłaszania czasu poprzez mechanizm dwóch kroków Two Step. W momencie wysyłania ramki Sync niosącej czas, nie jest dołączany czas rzeczywisty, a jedynie zatrzaskiwany w rejestrze urządzenia. Następnie za pomocą komunikatu Follow Up zapamiętany wcześniej znacznik czasu jest pobierany i wysyłany już w trybie normalnej ramki rozgłoszeniowej. W trakcie rozwoju urządzeń w większości wypadków jest już wspierany tryb One Step, który można uznać za preferowany i docelowy. Istnieje interoperacyjność w przypadku pracy urządzeń w obu trybach. Na Rysunku 5 przedstawiono sposób wymiany komunikatów w trybie One Step i Two Step. Dla uproszczenia zostało to zaprezentowane w trybie kalkulacji opóźnień E2E. Dla trybu P2P również po ramce Sync będzie wysyłany komunikat Follow Up, nie będzie pozostałych komunikatów, które zostaną zastąpione komunikatami typu Peer.
Rysunek 5. Kalkulacja opóźnień One Step i Two Step w trybie E2E
IEEE 1588 Power Profile
W standardzie PTPv2 wprowadzone profile pozwalają na szereg opcji, jeżeli chodzi o ich konfigurację. Profile definiują pewne funkcje, wskazując ich konkretne zastosowanie.
Na początku dla zastosowań w energetyce (głównie dla aplikacji z PMU) powstał Power Profile IEEE Std C37.238-2011, który dzięki zoptymalizowanym parametrom i przy minimalnej konfiguracji po stronie użytkownika pozwala osiągać dokładność synchronizacji poniżej 1 µs przy topologiach sieciowych typowych dla systemów automatyki stacji. Kolejno pojawił się profil określony jako Utility Profile opisany w IEC61850-9-3:2016. Zaraz potem dokonano uproszczenia Power Profile i powstał dokument IEEE Std C37.238-2017. Profile specyfikują konfiguracje PTP, sposób wyznaczania opóźnień oraz dodają specyficzne pola TLV. Brak tych pól w komunikatach PTP oznacza brak interoperacyjności PTP z urządzeniami automatyki stacyjnej.
W dokumentach standaryzacyjnych dotyczących profili określana jest również Management Information Base (MIB) dla Simple Network Management Protocol (SNMP) dla PTP Power Profile i umożliwia monitorowanie kluczowych parametrów urządzeń za pomocą standardowych narzędzi do zarządzania siecią.
Power Profile definiuje wymagania dla przełączników Ethernetowych, które mogą wprowadzić niedokładność nie większą niż 50ns w trybie TC i 200ns w trybie BC. Wartość niedokładności nie większą niż 200ns przyjmuje się dla OSC. Urządzenie MC powinno oferować dokładność lepszą niż 200ns.
Profile stosowane w energetyce wymagają, aby do transportu wszystkich wiadomości PTP w sieci Ethernet były używane przełączniki w trybie PTP Peer-to-Peer, a wszystkie wiadomości przesyłane były za pomocą ramek rozgłoszeniowych Ethernet w warstwie 2 modelu OSI/ISO. Poczynione założenie co do metody określania opóźnień niosą następujące zalety:
• Ruch i obciążenie, które kierowane jest na główny zegar w sieci, nie zwiększa się wraz z dodawaniem kolejnych urządzeń OSC. Grand Master komunikuje się tylko z przełącznikiem Ethernet, do którego jest podłączony.
• System PTP automatycznie uwzględnia opóźnienia wyliczone dla każdego połączenia , gdy zawiedzie podstawowe połączenie sieciowe i zostanie użyta alternatywna ścieżka. Opóźnienia na ścieżce są mierzone na wszystkich łączach sieciowych nawet tych, które są zablokowane do normalnego ruchu np. przez protokoły SpanningTree, ITU-T G8032, itp.
• Możliwość śledzenia na urządzeniach (nawet TC) stanu połączeń i opóźnień z tym związanych.
Zalety wykorzystania PTP
Biorąc pod uwagę przedstawiony zarys technologii, wykorzystanie PTP do dystrybucji czasu z dokładnych i scentralizowanych serwerów czasu GMC umieszczonych na stacjach elektroenergetycznych w stosunku do aplikacji rozproszonych lokalnych odbiorników GNSS posiada następujące zalety:
1. Dystrybucja danych i synchronizacji czasu jest realizowana w tej samej sieci Ethernet.
2. Ruch w sieci Ethernet nie ma wpływu na dokładność synchronizacji. Jedynie w przypadku przeciążenia lub rekonfiguracji sieci wiadomości PTP mogą zostać utracone. Można uniknąć takiej sytuacji wykorzystując w budowie architektury przełączniki Ethernetowe wyposażone w interfejsy 10Gbit/s. Oszczędzamy dzięki temu budżet, a sieć z precyzyjną synchronizacją możemy wykorzystać do transmisji danych wrażliwych na czas propagacji z szyny procesowanej IEC 61850 jak PMU, GOOSE czy SV.
3. PTP daje możliwość zastosowania redundantnych zegarów Grandmaster z automatycznym przełączaniem awaryjnym.
4. Sieć może być rozbudowywana bez zbędnego obciążania Grandmastera dzięki konfiguracji P2P.
5. Opóźnienia propagacyjne, wynikające z długich przebiegów kabli, są automatycznie kompensowane. Kalibracja węzłów i urządzeń w terenie nie musi być wykonywane ręcznie.
6. W PTP Power Profile szybkość wysyłana komunikatów ( w przybliżeniu co 1s) została zoptymalizowana tak, aby sprostać wymaganiom osiągnięcia dokładności lepszej niż 1 µs, nie powodując też nadmiernego ruchu w sieci współdzielonej.
7. Brak jest problemów konfiguracyjnych dotyczących czasu Universal Time Coordinated (UTC) lub czasu lokalnego. Używana jest pojedyncza referencja czasowa, dzięki czemu wszystkie urządzenia OSC na stacjach i poza używają międzynarodowego czasu atomowego International Atomic Time (TAI), co pozwala uniknąć między innymi problemów z zmianą czasu.
8. Do transmisji PTPv2 można wykorzystać zarówno światłowodu i skrętki Ethernet, a nawet sieci radiowych.
9. PTP transmituje lokalne przesunięcie czasowe, więc nie ma potrzeby konfigurowania lokalnej strefy czasowej na przekaźnikach zabezpieczających.
10. Wszelkie zmiany w datach działania czasu letniego muszą być wprowadzane tylko do Grandmastera, a nie do każdego urządzenia w sieci. Zastosowany mechanizm jest zdefiniowany w standardzie IEEE C37.238-2011/2017 jak i Utility Profile.
11. W celu zwiększenia niezawodności połączeń sieciowych pomiędzy urządzeniami PTP można wykorzystać protokoły umożliwiające nadmiarowe połączenia Ethernet, takie jak protokół RSTP, ITU-TG.8032 bezstratne protokoły redundancji Parallel Redundancy Protocol (PRP) i High-availability Seamless Redundancy (HSR).
Mgr inż. Krzysztof Nowacki
Dyrektor ds. Badań i Rozwoju
BitStream S.A.
www.bitstream.pl
Literatura
1. IEEE 1588 v2.1:2019 - IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems
2. IEEE Std C37.238™-2017, IEEE Standard Profile for Use of IEEE 1588™ Precision Time Protocol in Power System Applications
3. IEC TR 61850-90-12 :2020 Communication networks and systems for power utility automation - Part 90-12: Wide area network engineering guidelines
4. IEC TR 61850-90-5:2012 Communication networks and systems for power utility automation - Part 90-5: Use of IEC 61850 to transmit synchrophasor information according to IEEE C37.118
5. Practical aspects of IEC 61850-9-2 implementation in microprocessor-based protection and control IEDs
6. IEC 61850-9-2 LE (Lite Edition). Implementation Guideline for Digital Interface to Instrument Transformers using IEC 61850-9-2.
7. IEC 62439-3 (International Standard). Industrial Communication Networks – High Availability Automation Networks – Part 3: Parallel Redundancy Protocol (PRP) and High-availability Seamless Redundancy (HSR).
8. A. Carta, N. Locci, C. Muscas, F. Pinna, and S. Sulis, "GPS and 1588 synchronization for the measurement of synchrophasors in electric power systems," Computer Standards & Interfaces, vol. 33, no. 2, pp. 176-181, February 2011.
9. K. Behrendt and K. Fodero, "The Perfect Time: An Examination of Time Synchronization Techniques," SEL Inc., TP6226-01,








