Sincronización horaria IEEE 1588
Cada vez son más las aplicaciones de protección y control en las subestaciones que empiezan a utilizar Ethernet como canal de comunicación. Por consiguiente, cabe suponer que Ethernet se convertirá en el principal medio de comunicación de las futuras subestaciones, especialmente en el nivel de transmisión.
Las subestaciones digitales requieren una arquitectura de red optimizada que integre plenamente todos los componentes del sistema de automatización IEC 61850. Para ello es necesario que todos los equipos de control y medición, disponibles en varios proveedores, sean plug-and-play. Muchas aplicaciones IEC 61850 requieren una alta precisión de temporización y una redundancia de comunicación rápida o sin fisuras para funcionar correctamente y alcanzar el nivel de fiabilidad requerido en las aplicaciones de energía.
Teniendo en cuenta el coste y la fiabilidad de los sistemas de cronometraje basados en receptores GPS distribuidos, es aconsejable que las empresas de distribución utilicen menos receptores GPS distribuidos y utilicen el capital ahorrado para implantar sistemas de cronometraje centralizados más fiables y robustos con diferentes fuentes de datos de entrada y algoritmos de validación para hacer frente a las perturbaciones intencionadas y naturales. Suponiendo que se disponga de una sólida fuente de temporización centralizada, la difusión fiable y precisa de la temporización será crucial para las aplicaciones críticas de control y medición que requieran una precisión de temporización de ±1 μs.
En términos de coste, complejidad y fiabilidad en comparación con diferentes métodos de sincronización horaria, el PTP IEEE 1588v2 es un buen candidato para una solución de sincronización en subestaciones.
Este artículo ofrece una introducción a la norma IEEE 1588v2 y proporciona conocimientos suficientes sobre la cuestión clave de la sincronización horaria.
¿Qué es IEEE1588?
La norma IEEE 1588-2008 define la segunda generación de PTP, también conocida como PTPv2 o 1588v2. El estándar PTP ofrece la posibilidad de lograr una sincronización horaria muy precisa con los dispositivos Ethernet mediante el registro de la hora exacta en que se recibió el mensaje de sincronización PTP. Esta información puede compensar la incertidumbre introducida por los sistemas operativos en tiempo real y otros retrasos creados durante el proceso de sincronización en el dispositivo maestro, así como en los dispositivos que se sincronizan. La gran ventaja de PTPv2 es que no afecta al funcionamiento de otros protocolos que se ejecutan en la red Ethernet, por lo que es posible que coexista en un mismo puerto con para 61850, 61850-8-1 GOOSE, DNP3, Sampled Values (SV) y otros protocolos de automatización de estaciones. Cuando se construyen estaciones, es importante equipar los conmutadores Ethernet con soporte PTP nativo, disponible sólo en los conmutadores de gama alta.
PTP soporta múltiples relojes maestros, que entre ellos seleccionan un único reloj designado como Gran Maestro. En caso de que el reloj seleccionado como maestro baje de categoría, es posible seleccionar autónomamente un reloj que actúe como nuevo Gran Maestro con mejor precisión que el actual.
Una de las principales características del PTP es su flexibilidad, ya que puede utilizarse para muchas aplicaciones de sincronización horaria con una precisión inferior a 10 ns. Esta precisión podría lograrse añadiendo perfiles especiales para los conmutadores Ethernet en PTPv2.
Los objetivos del PTP son lograr:
-
- precisión de microsegundos o incluso de nanosegundos,
- minimizar las necesidades de recursos en términos de red, software y hardware,
- implementación de la sincronización en las redes de datos,
- soporte para relojes con diferentes capacidades como la precisión, la resolución y la estabilidad.
IEEE 1588 PTPv2se utiliza en muchos ámbitos, como la automatización industrial y las redes de audio y vídeo. Una ventaja clave es que IEEE 1588 puede distribuirse a través de Ethernet: no requiere una red de distribución horaria adicional y evita la necesidad de instalar decenas de receptores GPS en las subestaciones. Al mismo tiempo, es más preciso que NTP/SNTP, ya que IEEE 1588 puede proporcionar una precisión de sub-microsegundos mediante el sellado de tiempo por hardware. El cuadro 1 resume las características de los diferentes métodos de sincronización disponibles actualmente en las subestaciones.
Tabela 1: Comparación de diferentes métodos de sincronización horaria en la estación
| Método | Precisión típica en una estación con un método determinado | Visualización de la fecha y la hora del día | No es necesario un cableado dedicado | Rentabilidad | Buen escalado con un gran número de dispositivos |
|---|---|---|---|---|---|
| IRIG-B (AM) | 1ms | + | |||
| IRIG-B (DC-shifted) | 100µs | + | |||
| 1PPS | 1µs | ||||
| GPS | 1µs | + | |||
| NTP | 1-10ms | + | + | + | |
| IEEE 1588 v1 | 1µs | + | + | + | |
| IEEE 1588 v2 | 1µs | + | + | + | + |
Tipos de relojes
Para el estándar PTP se definen tres tipos de relojes, a saber, Reloj Ordinario (OC), Reloj Transparente (TC) y Reloj de Límite (BC). Estos relojes trabajan juntos para distribuir mensajes de sincronización de alta precisión en toda la estructura de sincronización.
Ordinary clock (OC)
es un dispositivo con un solo puerto que soporta PTP. Mantiene la escala de tiempo en el dominio PTP. Puede configurarse como reloj maestro o sólo como reloj esclavo.
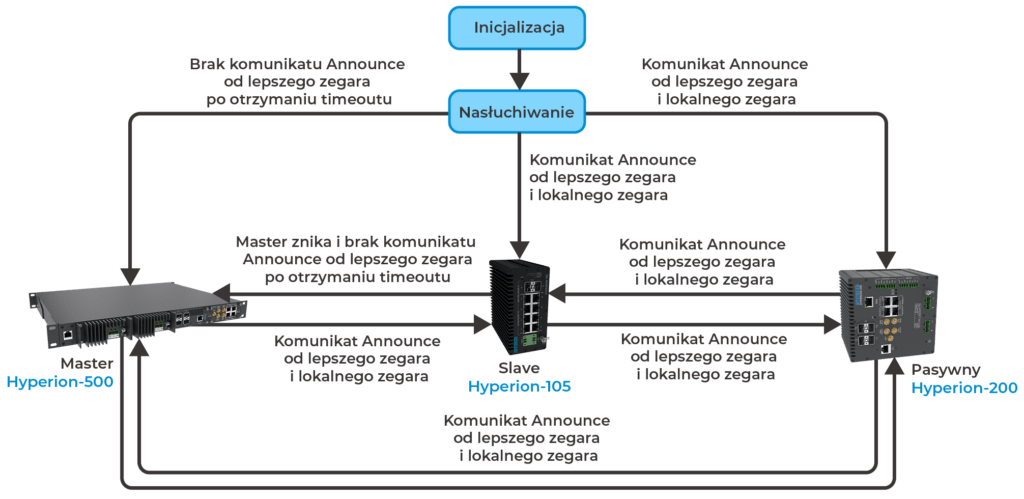
El papel de maestro significa que el reloj actúa como Gran Maestro, enviando mensajes de sincronización a la red. Tal y como se define en PTPv2, sólo un reloj maestro puede ser la fuente de tiempo definitiva en un dominio y se denomina reloj maestro. Sin embargo, PTP permite que varios relojes actúen como Gran Maestro si es necesario. Por lo tanto, aunque haya más de un reloj configurado en modo maestro, sólo uno puede convertirse en Gran Maestro y el resto permanece en estado pasivo. Un reloj en estado pasivo no envía ningún mensaje. Sólo se trata de un Maestro de reserva, que escucha el estado del Gran Maestro actual, a la espera de asumir su papel si su precisión se deteriora.
Un reloj sólo esclavo significa que sólo puede recibir mensajes de sincronización de la red para sincronizar su propio oscilador interno para hacer coincidir la frecuencia y la fase con el reloj maestro.
Transparent Clock (TC)
La información en los sistemas de comunicación se envía a través de conmutadores y routers con cierto retraso. La función del TC es medir con precisión el retardo de conmutación y añadir esta información al mensaje PTP.
Los interruptores TC pueden configurarse de dos maneras: TC End-to-End (E2E) o TC Peer-to-Peer (P2P), dependiendo del mecanismo de medición de retardo utilizado. Si el reloj funciona en modo E2E, sólo se incluye el tiempo de permanencia en el campo de corrección del mensaje PTP de destino. El P2P, por su parte, también se comunica con el dispositivo al que envía el mensaje para obtener información sobre el retardo de los pares, que se añade a los campos de corrección junto con el retardo de la estancia.
Boundary clock (BC)
en principio de funcionamiento es similar al TC, que normalmente actúa como conmutador de red, pero está equipado con un oscilador local. La diferencia es que el TC sólo transporta paquetes de red y los marca con marcas de tiempo, mientras que el BC actúa como reloj intermediario entre el Gran Maestro y el esclavo. Tiene un puerto en estado esclavo, sincronizado con el reloj maestro, mientras que los otros puertos actúan como maestros para los relojes inferiores.
Como resultado, las BCs dividen toda la región temporal en diferentes segmentos o subdominios, cada uno de los cuales puede tener diferentes ajustes de configuración. La arquitectura general se muestra en la Figura 1. Un BC puede formar parte de una sección de reloj maestro, y el puerto maestro puede convertirse en el Gran Maestro de toda la red si todos los relojes maestros actuales fallan. Esto da una gran ventaja sobre el TC, proporcionando una fuente de tiempo consistente durante el fallo del Grandmaster para mantener una referencia de tiempo común para los dispositivos de la red. Una de las desventajas de los BC es que, aunque pueden conectarse en cascada de forma similar a los TC, esta topología es susceptible de sufrir mayores errores de sincronización acumulados.
Principio de funcionamiento IEEE 1588v2
En general, el proceso de sincronización IEEE 1588v2 consta de dos etapas.
-Establecer una jerarquía maestro-esclavo: decidir el papel y el estado de cada puerto de todos los relojes ordinarios (OC) y Boundary Clocks (BC),
–
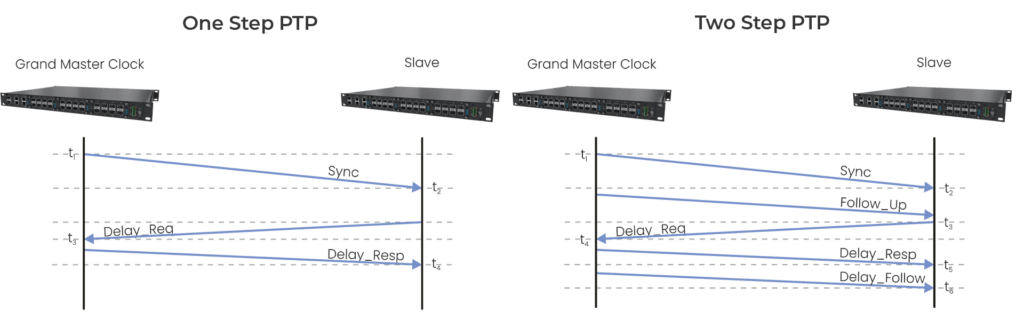
Sincronización: el reloj Gran Maestro comienza a sincronizar los relojes esclavos.
Para establecer una jerarquía Maestro-Esclavo, es necesario decidir qué nodo es el reloj Gran Maestro de todo el sistema, qué nodo es el reloj maestro y cuál es el reloj esclavo. El Algoritmo de Mejor Reloj Maestro puede establecer una jerarquía Maestro-Esclavo determinando el estado de cada puerto (Maestro, Esclavo o Pasivo) en el reloj OC o BC. Los TCs intermedios IEEE 1588v2 (por ejemplo, los switches que soportan el estándar 1588v2) miden entonces la latencia de los mensajes 1588 enviados desde un puerto en estado Maestro a un puerto en estado Esclavo. Este retraso será utilizado por el puerto en estado esclavo para ajustar la hora del reloj local.