

Cada vez son más las aplicaciones de seguridad y control de subestaciones que empiezan a utilizar Ethernet como canal de comunicación principal. Por tanto, es razonable suponer que Ethernet se convertirá en el principal medio de comunicación de las futuras subestaciones, no sólo a nivel de transmisión, sino también de servicios asociados, como la sincronización horaria precisa.
Las estaciones digitales requieren una arquitectura de red optimizada en el tiempo que integre plenamente todos los elementos del sistema de automatización IEC 61850. Se entiende por optimización en el dominio del tiempo, la criticidad de la latencia y las fluctuaciones de los paquetes, pero también, y quizás lo más importante, la capacidad de la red para llevar a cabo una sincronización horaria precisa. Muchas aplicaciones IEC 61850 requieren una sincronización horaria de alta precisión y una redundancia de comunicación rápida, si no sin pérdidas, para funcionar correctamente y alcanzar el nivel de fiabilidad exigido en la industria energética.
Dado el coste y la fiabilidad de los sistemas de medición basados en receptores distribuidos de Sistemas Globales de Navegación por Satélite (GNSS), es aconsejable que las unidades de distribución utilicen menos receptores GNSS distribuidos y opten por la implantación de sistemas de distribución de tiempo centralizados más fiables y robustos con diferentes fuentes de datos de entrada y algoritmos de validación. De este modo se resolverán los problemas de calidad de la sincronización horaria, mantenimiento de la red de sincronización y resistencia a las interferencias o suplantación de identidad. Suponiendo que se disponga de una fuente de tiempo de estación precisa y centralizada, la distribución fiable y exacta de la hora será esencial para el correcto funcionamiento de las aplicaciones críticas de control y medición que requieran una precisión de temporización no inferior a ±1 μs.
En términos de coste, complejidad y fiabilidad en comparación con los diversos métodos de sincronización de tiempo disponibles, el Protocolo de Tiempo de Precisión (PTP) definido en IEEE1588 v2.1 es un buen candidato para resolver los problemas de sincronización en las subestaciones.
Este artículo ofrece una introducción a IEEE 1588 v2.1 y proporciona conocimientos generales sobre los problemas de aplicación de la sincronización de tiempo de precisión. También se abordan los requisitos generales para la hora de precisión en aplicaciones de subestaciones.
IEEE 1588 - Introducción
El estándar actual IEEE 1588 v2.1: 2019 (versión anterior IEEE1588 v.2.0:2008) define la segunda generación del Protocolo de Tiempo de Precisión también conocido como PTPv2.1 o 1588v2.1. El estándar PTP proporciona la capacidad de lograr una sincronización horaria de alta precisión con dispositivos Ethernet (normalmente conmutadores) a través del procesamiento hardware-software de la hora exacta y los mensajes PTP. El procesamiento de hardware con soporte de software, puede compensar la incertidumbre introducida por los sistemas operativos en tiempo real y otros retrasos creados durante el proceso de sincronización en los dispositivos de distribución de sincronización, así como en los dispositivos que se sincronizan. La gran ventaja de la segunda versión de PTP es que no afecta al funcionamiento de otros protocolos que se ejecutan en la red Ethernet y reduce la carga de la CPU. Como resultado, es posible distribuirlo con otros protocolos de estación sensibles al tiempo, como Generic Object Oriented Substation Event (GOOSE), Sampled Values (SV), Phasor Measurement Units (PMU) y otros protocolos de automatización de estaciones. Cuando se construyen estaciones, es importante equipar los conmutadores Ethernet con soporte de hardware completo para PTP junto con los perfiles necesarios, es decir, al menos Power Profile - IEEE C37.238 e IEC 61850-9-3 disponible sólo en la clase más alta de conmutadores.
PTP es compatible con múltiples Relojes Maestros (MC), lo que permite a los dispositivos seleccionar el mejor Gran Reloj Maestro (GMC) a través del Algoritmo del Mejor Reloj Maestro (BMCA). En caso de degradación de la calidad del reloj seleccionado como maestro, es posible seleccionar automáticamente otro reloj en tiempo real para que actúe como nuevo GMC del receptor con mejor precisión que el anterior hasta que recupere su capacidad de sincronización al nivel anterior.
Una de las principales características del PTP es su flexibilidad, ya que puede utilizarse para numerosas aplicaciones de sincronización horaria con una precisión inferior a 1 μs.
Los objetivos del PTP son conseguir:
- precisión de nanosegundos en la distribución del tiempo,
- minimizando los recursos de la CPU a expensas del soporte de hardware,
- implementación de sincronización precisa en redes de datos,
- soporte de relojes con diferentes capacidades como precisión, exactitud y estabilidad.
IEEE 1588 PTP se utiliza en muchas áreas como telecomunicaciones, automatización industrial, automatización de estaciones, redes de audio y vídeo, bolsa y proyectos específicos de IoT, entre otros. Una ventaja clave es que IEEE 1588 se puede distribuir por cable, pero también por radio Ethernet: no requiere una red de distribución de tiempo adicional y evita la necesidad de instalar docenas o cientos de receptores GNSS asociados a unidades que requieren tiempo de precisión. Al mismo tiempo, PTP es más preciso que Network Time Protocol (NTP), ya que PTP puede proporcionar una precisión de nanosegundos con soporte de sellado de tiempo por hardware. Por lo tanto, es ideal para aplicaciones basadas en estaciones. La tabla 1 resume las características de los distintos métodos de sincronización disponibles actualmente para subestaciones.
Tabla 1: Comparación de los distintos métodos de sincronización horaria de subestaciones

Tipos de reloj
Para el estándar PTP se definen cuatro tipos principales de dispositivos, a saber, Reloj Ordinario (OC), Reloj Transparente (TC) y Reloj de Límite (BC), así como el ya mencionado Reloj Maestro. Estos relojes trabajan conjuntamente para distribuir mensajes de sincronización de alta precisión por toda la estructura temporal.
El Reloj Esclavo Ordinario (OSC) es un dispositivo de sincronización horaria de precisión PTP. Mantiene una escala de tiempo en el dominio PTP y se sincroniza con ella para la posterior sincronización de los circuitos internos dependientes de la aplicación. Para las aplicaciones, puede ofrecer una escala de tiempo en forma de marcador y/o señal de pulsos por segundo (PPS). La imprecisión de la sincronización que puede ofrecer el OSC dependerá de los circuitos internos y de la clase de oscilador local. Es posible utilizar Ethernet síncrona para mejorar el rendimiento de sincronización del oscilador local si se admite dicha funcionalidad.
Reloj transparente (TC) Los mensajes PTP en los sistemas de comunicación se envían a través de conmutadores y enrutadores con cierto retraso. El papel del TC es medir con precisión el retardo de conmutación y añadir esta información al mensaje PTP.
Los conmutadores TC pueden configurarse de dos maneras: TC End-to-End (E2E) o TC Peer-to-Peer (P2P) dependiendo del mecanismo de medición de retardo utilizado. Si el temporizador funciona en modo E2E, el tiempo de espera se añade al campo de corrección del mensaje PTP de destino. Por otra parte, el TC P2P también se comunica con el dispositivo ascendente (en el lado MC) al que envía mensajes PTP Peer para obtener información sobre el retardo de la conexión, que se añade a los campos de corrección junto con el tiempo de permanencia de los paquetes PTP. El modo de cálculo del retardo P2P es necesario para las aplicaciones de estación en los perfiles requeridos. No es posible utilizar equipos de estación inteligentes con el modo E2E, que se define en las aplicaciones de telecomunicaciones, por ejemplo, en el perfil de telecomunicaciones ITU-T G.8275.1. Por lo tanto, al seleccionar hardware dedicado a soluciones de estación, deben comprobarse cuidadosamente las capacidades PTP del dispositivo. La corrección posterior del mecanismo de cálculo del retardo mediante la sustitución del software puede resultar engorrosa o imposible sin sustituir el hardware.
El reloj de frontera (BC) consta de OSC y MC separados por circuitos internos de sincronización de tiempo y frecuencia (circuitos osciladores locales). El conjunto implementado en el conmutador de red permite detectar automáticamente el lado de los relojes maestros y, mediante el algoritmo BMCA, seleccionar la mejor fuente. En el puerto del conmutador designado por el algoritmo BMCA, se configura automáticamente la función OSC y el resto de puertos configuran automáticamente el modo MC. Como resultado, los BCs dividen el área de sincronización en diferentes segmentos o subdominios, cada uno de los cuales puede tener diferentes ajustes de configuración hasta cierto punto. Al igual que ocurre con los CT, el cálculo del retardo puede realizarse en modo E2E y P2P. Para las aplicaciones de estación, se requiere el modo de cálculo de retardo P2P. A la hora de configurar las aplicaciones de BC y estación, cabe mencionar que se requiere compatibilidad con perfiles específicos, por ejemplo, como IEEE C37.238 e IEC 61850-9-3.
Figura 1: Ejemplo de red de sincronización PTP basada en soluciones Bitstream
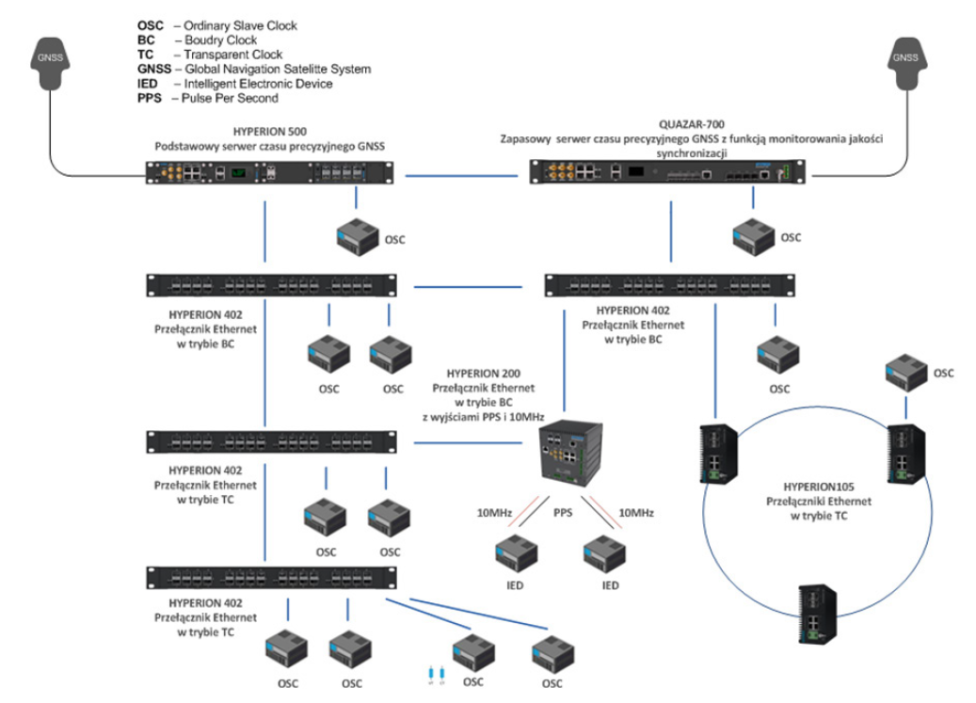
Como muestra la figura 1, la red de sincronización horaria puede admitir cualquier topología de conexión. Un mecanismo de selección del mejor reloj garantizará la correcta selección de la ruta de sincronización y la conmutación a la mejor fuente. La estructura puede ser multinivel e incluir enlaces de transmisión heterogéneos (par trenzado, fibra óptica o radio WiFi). A falta de soporte directo del protocolo PTP en los dispositivos finales, éstos pueden sincronizarse desde dispositivos intermedios de la cadena PTP equipados con salidas adecuadas, por ejemplo, PPS - sincronización y reloj de 10MHz - sintonización. Un nodo de este tipo debe desempeñar el papel de OSC o BC para poder emitir las señales adecuadas. Un papel importante en una red tan extensa lo desempeña un sistema de supervisión o control de la calidad de la sincronización. Por lo tanto, si los servidores de tiempo y los elementos de los nodos proceden de un mismo fabricante, estarán equipados con una configuración y un sistema de supervisión coherentes, lo que facilitará el mantenimiento de una infraestructura de este tipo.
La figura 2 muestra el método de cálculo del retardo para las configuraciones P2P necesarias en la generación de energía, la automatización industrial o las redes de audio y vídeo. El intercambio de mensajes que se muestra se refiere al modo One Step, que se abordará más adelante en este artículo.
Figura 2: Ejemplo de cálculo de latencia en modo P2P (One Step)
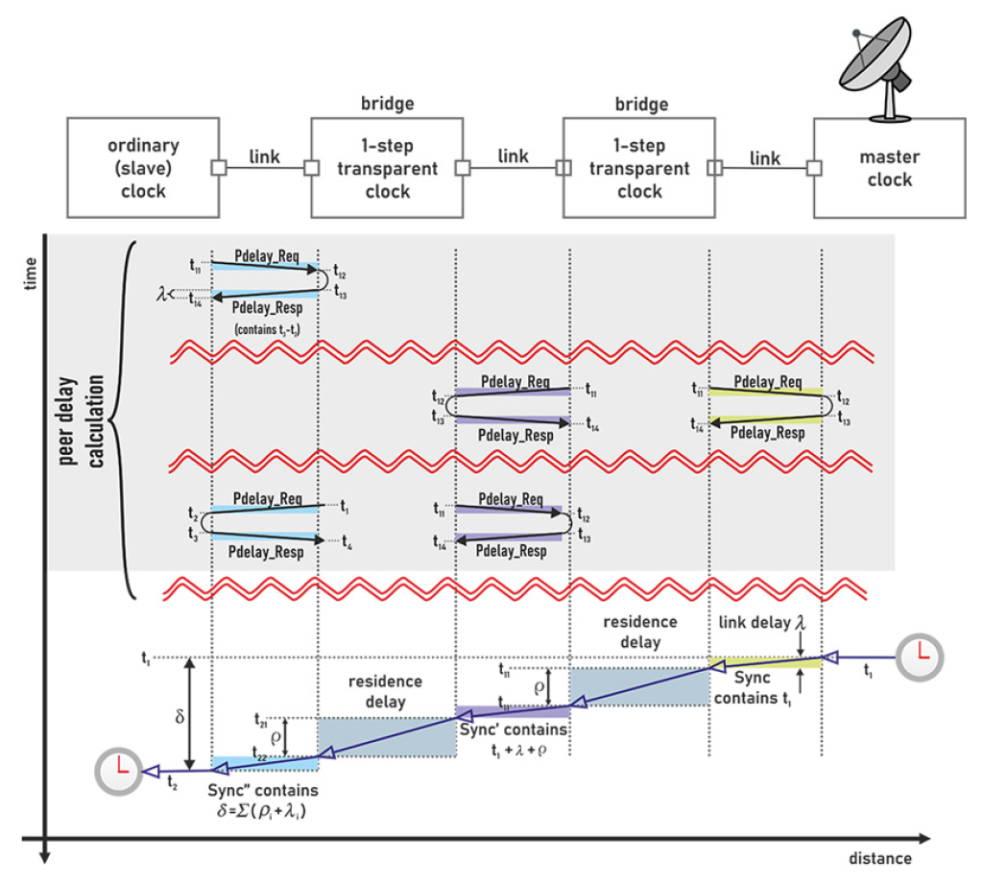
Como se muestra en la Figura 2, un mensaje Sync que lleva una marca de tiempo de precisión se distribuye a través de dos nodos (conmutadores) que operan en modo TC. Cada uno de ellos, basándose en el intercambio de mensajes Pdelay_Req (Peer Delay Request) y Pdelay_Res (Peer Delay Response) entre los nodos, tiene la tarea de determinar el Retardo de Enlace. Los dispositivos TC también acaban de determinar el retardo de propagación Residence Delay. Cada nodo incluye los retardos calculados en el mensaje SynC. Al final del proceso, el receptor tiene en cuenta el último retardo de vía.
Sincronización del receptor y la red IEEE 1588v2
Describiendo el proceso de sincronización de la red y de los dispositivos en general a través del protocolo IEEE 1588 v2.1, consta de varios pasos, como se indica a continuación:
1. Establecimiento de la jerarquía Maestro-Esclavo: decidir el papel y el estado de cada puerto de todos los Relojes de Límite y Relojes Ordinarios mediante el mecanismo BMCA.
2. Sincronización: el Reloj Gran Maestro comienza a sincronizar los relojes esclavos.
3. medición del retardo de los nodos de red configurados en modo P2P o determinación del retardo entre maestro y esclavo en modo E2E.
4. Sincronización de los nodos Relojes de Límite y Relojes Esclavos Ordinarios.
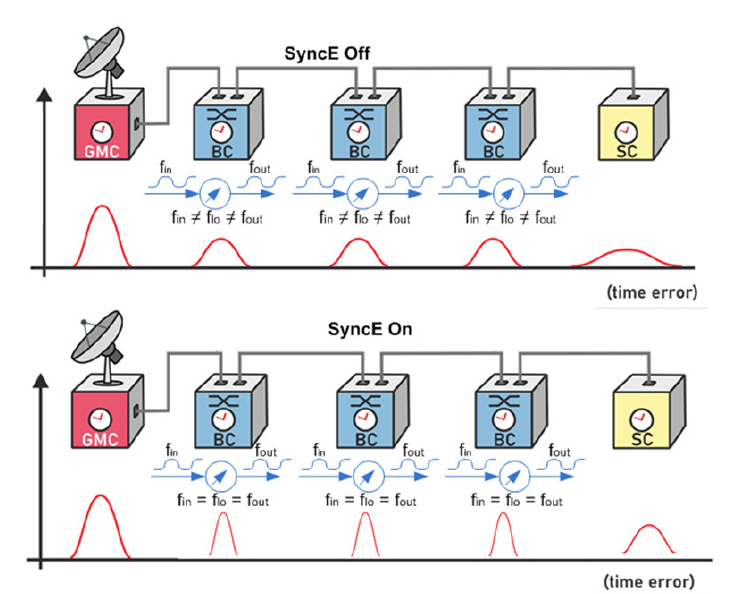
La sincronización de los nodos OSC y BC se realizará por etapas. Normalmente, en estos dispositivos se incorporan circuitos de control automático para sintonizar la sincronización interna. Normalmente, el regulador intenta sintonizar la frecuencia y en la siguiente etapa se ocupa del ajuste fino de la fase (temporización). Dependiendo de los ajustes de los miembros inerciales del regulador, el tiempo de sintonización de la fase puede alcanzar varios minutos. El ajuste de fase será sensible a los cambios en la frecuencia del oscilador local, de ahí que sea una parte importante del dispositivo OSC o BC. Podemos mejorar la sincronización PTP sincronizando los circuitos de frecuencia mediante Ethernet síncrona (SyncE) especificada a través de ITU-T G.8261, ITU-T G.8262 e ITU-T G.8264, como se muestra en la Figura 3. En este caso, la sincronización de frecuencia se realiza utilizando la capa física de Ethernet y el PTP se encarga del ajuste de fase del OSC. La combinación de estos dos métodos es inherente a las redes de telecomunicaciones, mientras que, por razones desconocidas, es menos habitual en las redes de automatización.
Figura 3: Uso de Ethernet síncrona para mejorar el rendimiento de los dispositivos BC con PTP.
Algoritmo del mejor reloj maestro
BMCA es un algoritmo de toma de decisiones que se aplica a todos los nodos que admiten la función de sincronización de reloj, es decir, que tienen un OSC. Un puerto del Reloj Esclavo Ordinario tiene dos posibles estados básicos: es decir, Esclavo y para BC Esclavo y Maestro. Existen, por supuesto, muchos más estados que puede adoptar un puerto de dispositivo OSC o BC. Éstos definen estados transitorios o de emergencia. No obstante, en función de los ajustes de configuración y de la decisión del BMCA en caso de disponibilidad del Reloj Maestro, se toma una decisión final sobre el estado del puerto como tipo Esclavo receptor o como tipo Maestro sincronizador. Los dispositivos TC no sincronizan los circuitos internos y sólo transmiten mensajes PTP y procesan marcas de tiempo para los mensajes seleccionados, por lo que no utilizan el algoritmo BMCA y no hay estados de puerto definidos como se ha mencionado anteriormente.
El Reloj Maestro con la temporización definida para el perfil envía información sobre las propiedades del reloj a la red a través de mensajes Announce. El cambio de maestro y la inicialización del BMCA pueden activarse por la ausencia de mensajes Announce del gran maestro existente durante un periodo de tiempo determinado. El proceso también puede activarse automáticamente cuando el Master activo se degrada (no hay señal GNSS) o se conecta a la red otro nodo con un reloj mejor. BMCA utiliza el conjunto de datos de Announce para decidir qué Master tiene la mejor precisión o el usuario le ha dado la máxima prioridad para ser seleccionado como Grandmaster. Los datos de decisión se enumeran a continuación, por orden de prioridad:
1. Prioridad 1: es un ajuste definido por el usuario que puede configurarse de 0 a 255. Los valores más bajos tienen prioridad. Está diseñado para ser el más alto de la lista para evitar el resto de las comparaciones BMCA y acelerar la ejecución, así como para dar libertad a los usuarios en cuanto a la configuración del reloj.
2. ClockClass (el estado de sincronización con el reloj atómico): Valor de ClockClass, que indica la capacidad de seguir el tiempo o la frecuencia o, en otras palabras, el estado del reloj. Un valor de 6 indica sincronización con el tiempo atómico. Cuanto mayor sea el valor, peor será la clase. Un valor de ClockClass de255 se utiliza para relojes esclavos que no se sincronizan en la cadena PTP de dispositivos descendentes.
3. Precisión del reloj: se trata de un valor enumerado estimado por el reloj basado en el atributo de la fuente de tiempo y en la capacidad del propio reloj para soportarlo.
4. Desviación del reloj (offsetScaledLogVariance): Se trata de un valor estadístico de escala logarítmica que representa la precisión de la marca de tiempo cuando no está sincronizada por PTP en base al algoritmo especificado en PTPv2 (BC).
5. Prioridad 2: Se trata de otro ajuste de prioridad por parte del usuario, similar a la Prioridad 1. Si hay dos relojes Grandmaster idénticos, este ajuste puede utilizarse para seleccionar el Master preferido.
6. Identificación del reloj (GrandMasterID): el valor modificado de la dirección MAC del reloj, que es un valor único para cada reloj en la LAN.
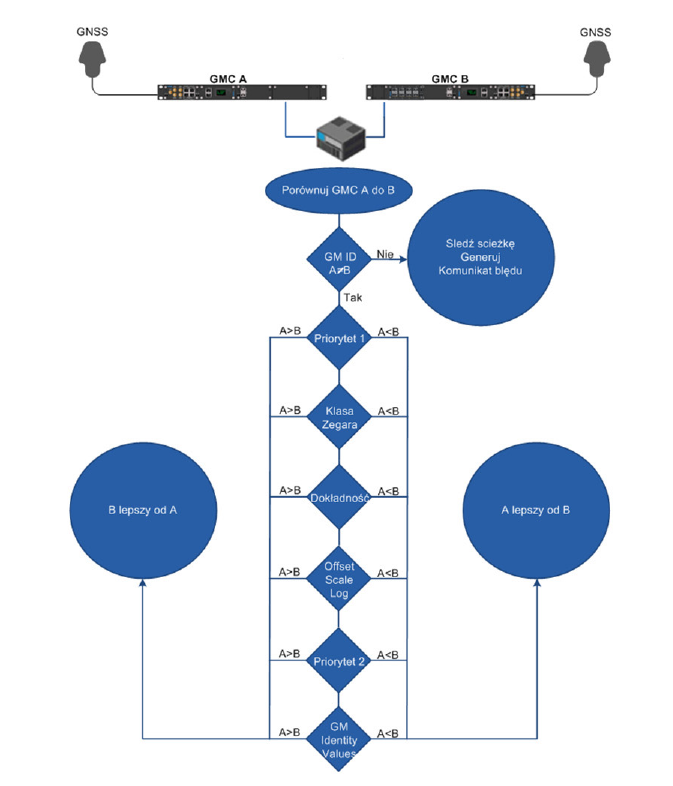
Puede ocurrir que los mensajes del Reloj Grand Master tomen rutas diferentes hacia el dispositivo Reloj Ordinario. En este caso, el algoritmo BMCA entra en modo de determinación de la ruta de sincronización y analiza otra serie de información para decidir el estado del puerto y el mensaje de error. La figura 4 muestra un algoritmo BMCA simplificado.
Figura 4: Método de selección del mejor reloj BMCA
Dos pasos y Un paso
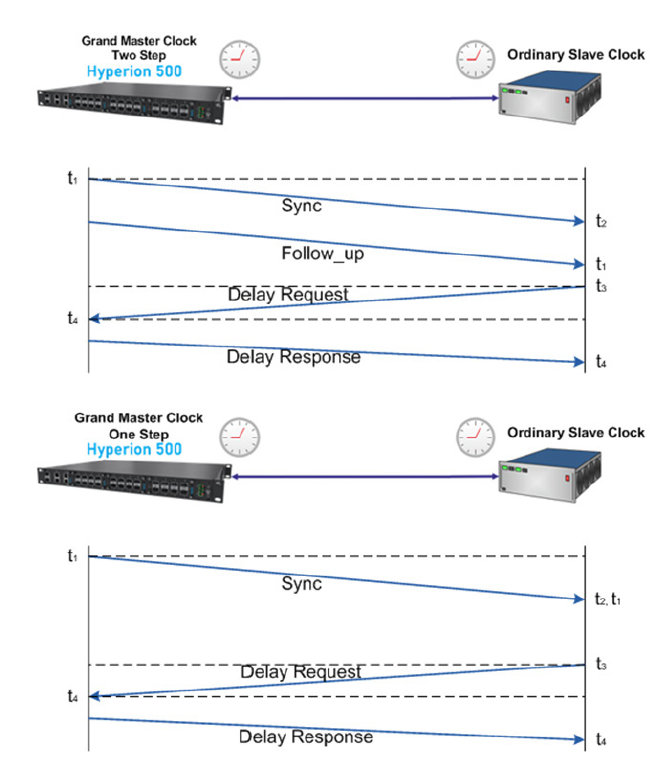
Se han definido dos métodos de transmisión de marcas de tiempo para cada tipo de nodo PTP, es decir, Un Paso y Dos Pasos. La definición de dos métodos para el envío de marcas de tiempo precisas fue el resultado del desarrollo de las capacidades de hardware de los dispositivos de red para soportar mensajes PTP. En las primeras soluciones, la función de recuperar el tiempo real de los circuitos internos del dispositivo Reloj Maestro durante la generación de tramas de Sincronización que llevan la marca de tiempo resultó difícil de conseguir. Por lo tanto, se decidió añadir el anuncio de la hora mediante un mecanismo de dos pasos. Al enviar una trama de sincronización con una marca de hora, la hora real no se añade, sino que sólo se almacena en el registro del dispositivo. Después, con el mensaje de seguimiento, se recupera la marca de tiempo memorizada previamente y se envía ya en el modo de una trama de difusión normal. En el curso del desarrollo de los dispositivos, el modo "Un paso" ya es compatible en la mayoría de los casos y puede considerarse el modo preferido y objetivo. Existe interoperabilidad cuando los dispositivos funcionan en ambos modos. La Figura 5 muestra cómo se intercambian los mensajes en los modos Un Paso y Dos Pasos. Para simplificar, se presenta en el modo de cálculo de retardo E2E. También para el modo P2P, se enviará un mensaje de Seguimiento después de la trama de Sincronización, no habrá otros mensajes, que serán sustituidos por mensajes Peer.
Figura 5: Cálculo de los retrasos de un paso y dos pasos en modo E2E
Perfil de potencia IEEE 1588
En el estándar PTPv2, los perfiles introducidos permiten una serie de opciones a la hora de su configuración. Los perfiles definen determinadas funciones, indicando su uso específico.
En primer lugar, se creó el perfil de potencia IEEE Std C37.238-2011 para aplicaciones de potencia (principalmente aplicaciones PMU) que, gracias a unos parámetros optimizados y a una configuración mínima por parte del usuario, permite alcanzar una precisión de sincronización inferior a 1 µs con topologías de red típicas de los sistemas de automatización de subestaciones. A este le siguió un perfil denominado Utility Profile descrito en IEC61850-9-3:2016. Inmediatamente después, se simplificó el Power Profile y se creó el documento IEEE Std C37.238-2017. Los perfiles especifican las configuraciones PTP, cómo se determinan los retardos y añaden campos TLV específicos. La ausencia de estos campos en los mensajes PTP significa que los PTP no son interoperables con los equipos de automatización de estaciones.
La base de información de gestión (MIB) del protocolo simple de gestión de red (SNMP) para el perfil de potencia PTP también se define en los documentos de normalización del perfil y permite supervisar los parámetros clave del dispositivo mediante herramientas estándar de gestión de red.
El perfil de potencia define requisitos para los conmutadores Ethernet que pueden introducir una imprecisión no superior a 50 ns en modo TC y 200 ns en modo BC. Para OSC se asume un valor de inexactitud no superior a 200ns. El dispositivo MC debe ofrecer una precisión superior a 200ns.
Los perfiles utilizados en la industria energética requieren que se utilicen conmutadores en modo PTP Peer-to-Peer para transportar todos los mensajes PTP en la red Ethernet, y que todos los mensajes se transmitan utilizando tramas de difusión Ethernet en la Capa 2 del modelo OSI/ISO. La suposición realizada sobre el método de determinación del retardo conlleva las siguientes ventajas:
- El tráfico y la carga que se dirige al reloj maestro en la red no aumenta a medida que se añaden más dispositivos OSC. El Gran Maestro sólo se comunica con el conmutador Ethernet al que está conectado.
- El sistema PTP tiene en cuenta automáticamente los retardos calculados para cada conexión , cuando falla la conexión de red primaria y se utiliza una ruta alternativa. Los retardos de ruta se miden en todos los enlaces de red, incluso en aquellos bloqueados al tráfico normal, por ejemplo, por protocolos SpanningTree, ITU-T G8032, etc.
- Posibilidad de realizar un seguimiento en los dispositivos (incluso en los TC) del estado de los enlaces y de los retrasos correspondientes.
Ventajas de la utilización de PTP
Teniendo en cuenta el esquema tecnológico presentado, el uso de PTP para distribuir la hora desde servidores horarios GMC precisos y centralizados ubicados en subestaciones sobre aplicaciones de receptores GNSS locales distribuidos tiene las siguientes ventajas:
1. La distribución de datos y la sincronización horaria se realizan en la misma red Ethernet.
2. La precisión de la sincronización no se ve afectada por el tráfico Ethernet. Sólo si la red se sobrecarga o se reconfigura, pueden perderse los mensajes PTP. Esta situación puede evitarse utilizando conmutadores Ethernet con interfaces de 10 Gbit/s en el diseño de la arquitectura. De este modo se ahorra presupuesto y se puede utilizar una red con sincronización precisa para transmitir datos de propagación sensibles al tiempo del bus de proceso IEC 61850, como PMU, GOOSE o SV.
3. El PTP ofrece la posibilidad de utilizar relojes Grandmaster redundantes con conmutación automática por error.
4. La red puede ampliarse sin carga innecesaria para el Grandmaster gracias a la configuración P2P.
5. Los retrasos de propagación debidos a largos tendidos de cable se compensan automáticamente. No es necesario calibrar manualmente los nodos y dispositivos sobre el terreno.
6. En el perfil de potencia PTP, la frecuencia de los mensajes (aproximadamente cada 1 s) se ha optimizado para cumplir los requisitos de lograr una precisión superior a 1 µs, sin provocar además un tráfico excesivo en la red compartida.
7. No hay problemas de configuración en relación con la hora universal coordinada (UTC) o la hora local. Se utiliza una única referencia horaria, de modo que todos los dispositivos OSC dentro y fuera de la estación utilizan la Hora Atómica Internacional (TAI), evitando, entre otros, problemas de cambio de hora.
8. PTPv2 puede transmitirse tanto por fibra como por Ethernet de par trenzado, o incluso por redes de radio.
9. PTP transmite un desfase horario local, por lo que no es necesario configurar una zona horaria local en los relés de seguridad.
10. Cualquier cambio en las fechas del horario de verano sólo debe realizarse en el Gran Maestro y no en todos los dispositivos de la red. El mecanismo utilizado se define en la norma IEEE C37.238-2011/2017, así como en el Perfil de Utilidad.
11. Para aumentar la fiabilidad de las conexiones de red entre dispositivos PTP se pueden utilizar protocolos que permiten conexiones Ethernet redundantes como RSTP, ITU-TG.8032 Parallel Redundancy Protocol (PRP) y High-availability Seamless Redundancy (HSR).
Krzysztof Nowacki, M.Sc.
Director de Investigación y Desarrollo
Bitsream S.A
www.bitstream.pl
Bibliografía
1. IEEE 1588 v2.1:2019 - IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems
2. IEEE Std C37.238™-2017, IEEE Standard Profile for Use of IEEE 1588™ Precision Time Protocol in Power System Applications
3. IEC TR 61850-90-12 :2020 Communication networks and systems for power utility automation - Part 90-12: Wide area network engineering guidelines
4. IEC TR 61850-90-5:2012 Communication networks and systems for power utility automation - Part 90-5: Use of IEC 61850 to transmit synchrophasor information according to IEEE C37.118
5. Practical aspects of IEC 61850-9-2 implementation in microprocessor-based protection and control IEDs
6. IEC 61850-9-2 LE (Lite Edition). Implementation Guideline for Digital Interface to Instrument Transformers using IEC 61850-9-2.
7. IEC 62439-3 (International Standard). Industrial Communication Networks – High Availability Automation Networks – Part 3: Parallel Redundancy Protocol (PRP) and High-availability Seamless Redundancy (HSR).
8. A. Carta, N. Locci, C. Muscas, F. Pinna, and S. Sulis, "GPS and 1588 synchronization for the measurement of synchrophasors in electric power systems," Computer Standards & Interfaces, vol. 33, no. 2, pp. 176-181, February 2011.
9. K. Behrendt and K. Fodero, "The Perfect Time: An Examination of Time Synchronization Techniques," SEL Inc., TP6226-01,








