IEEE 1588 Time Synchronization
An increasing number of substation protection and control applications are beginning to use Ethernet as a communication channel. Therefore, it can be assumed that Ethernet will become the main communication medium for future substations, especially at the transmission level.
Digital substations require an optimized network architecture that fully integrates all components of the IEC 61850 automation system. This requires that all control and measurement equipment, available from a variety of vendors, be plug-and-play. Many IEC 61850 applications require high timing accuracy and fast or seamless communication redundancy to operate properly and achieve the level of reliability required in power applications.
Considering the cost and reliability of timing systems based on distributed GPS receivers, it is advisable for distribution facilities to use fewer distributed GPS receivers and use the saved capital to implement more reliable and robust centralized timing systems with different input data sources and validation algorithms to deal with intentional and natural disturbances. Assuming that a robust centralized timing source is available, reliable and accurate timing dissemination will be critical for critical control and measurement applications requiring timing accuracy of ±1 μs.
In terms of cost, complexity, and reliability compared to various time synchronization methods, the IEEE 1588v2 PTP is a good candidate for a substation synchronization solution.
This paper provides an introduction to IEEE 1588v2 and provides sufficient background knowledge of the key issue of time synchronization.
What is IEEE1588?
The IEEE 1588-2008 standard defines the second generation of PTP, also known as PTPv2 or 1588v2. The PTP standard provides the ability to achieve highly accurate time synchronization with Ethernet devices by recording the exact time the PTP synchronization message was received. This information can compensate for the uncertainty introduced by real-time operating systems and other delays created by the synchronization process in the master device as well as in the devices that are synchronized. A great advantage of PTPv2 is that it does not affect the operation of other protocols running on the Ethernet network, making it possible for it to co-exist on a single port with 61850, 61850-8-1 GOOSE, DNP3, Sampled Values (SV) and other station automation protocols. It is important when building a station to equip Ethernet switches with native support for PTP, which is only available on the highest-end switches.
PTP supports multiple master clocks that between them select a single clock designated as Grandmaster. If the clock selected as master is downgraded, it is possible to auto-nominally select a clock in real time to act as the new Grandmaster with better accuracy than the current clock.
One of the main features of PTP is its flexibility, as it can be used for many time synchronization applications with an accuracy of less than 10 ns. Such accuracy could be achieved by adding special profiles for Ethernet switches in PTPv2.
The goals of the PTP are to achieve:
- microsecond or even nanosecond timing accuracy,
- Minimized resource requirements for network, software and hardware,
- implementing synchronization in data networks,
- Clock support with different capabilities such as precision, resolution, and stability.
IEEE 1588 PTPv2 is used in many areas, such as industrial automation and audio and video networks. One key advantage is that IEEE 1588 can be distributed over Ethernet: it does not require an additional time distribution network and avoids the need to install dozens of GPS receivers in substations. At the same time, it is more precise than NTP/SNTP because IEEE 1588 can provide sub-microsecond accuracy using hardware time stamping. Table 1 summarizes the characteristics of the different synchronization methods currently available in substations.
Tabel 1: Comparison of different station time synchronization methods
| Method | Typical accuracy at a station using a given methody | Display of date and time of day | Dedicated cabling not required | Cost effectiveness | Scales well with a large number of devices |
|---|---|---|---|---|---|
| IRIG-B (AM) | 1ms | + | |||
| IRIG-B (DC-shifted) | 100µs | + | |||
| 1PPS | 1µs | ||||
| GPS | 1µs | + | |||
| NTP | 1-10ms | + | + | + | |
| IEEE 1588 v1 | 1µs | + | + | + | |
| IEEE 1588 v2 | 1µs | + | + | + | + |
Types of clocks
Three types of clocks are defined for the PTP standard, namely Ordinary Clock (OC), Transparent Clock (TC) and Boundary Clock (BC). These clocks work together to distribute highly accurate synchronization messages throughout the timing structure.
Ordinary clock (OC) is a single port device that supports PTP. It maintains a time scale in the PTP domain. It can be configured as a master clock or just a slave clock.
The master role means that the clock acts as a Grandmaster, sending synchronization messages to the network. As defined in PTPv2, only one master clock can be the final time source in a domain and is called a Grandmaster clock. However, PTP allows multiple clocks to act as Grandmaster if required. Therefore, even though there may be more than one clock configured in master mode, only one can become the Grandmaster and the rest remain in the passive state. A clock in the passive state does not send any messages. It is only treated as a Backup Master that listens to the state of the current Grandmaster, waiting to take over its role if its precision degrades.
A slave-only clock means that it can only receive synchronization messages from the network to synchronize its own internal oscillator to match the frequency and phase to the master clock.
Transparent Clock (TC) Information in communication systems is sent through switches and routers with some delay. The role of the TC is to accurately measure the switching delay and add this information to the PTP message.
TC switches can be configured in two ways: TC End-to-End (E2E) or TC Peer-to-Peer (P2P), depending on the delay measurement mechanism used. If the clock operates in E2E mode, only the dwell time is included in the correction field of the target PTP message. P2P, on the other hand, also communicates with the device to which it sends the message to obtain peer delay information, which is added to the correction fields along with the dwell delay.
Boundary clock (BC) in principle operation is similar to TC, which normally acts as a network switch, but is equipped with a local oscillator. The difference is that the TC transports only network packets and marks them with timestamps, while the BC acts as an intermediary clock between the Grandmaster and the Slave. It has one port in the slave state, synchronized to the master clock, while the other ports act as masters for the clocks below.
As a result, BCs divide the entire time region into different segments or subdomains, and each segment can have different configuration settings. The overall architecture is shown in Figure 1. A BC can be part of a master clock section, and the master port can become the Grandmaster of the entire network if all current master clocks fail. This gives a huge advantage over TC by providing a consistent time source during Grandmaster failures to maintain a common time reference for network devices. One disadvantage of BCs is that while they can be cascaded similar to TCs, this topology is susceptible to higher cumulative synchronization errors.
IEEE 1588v2 operating principle
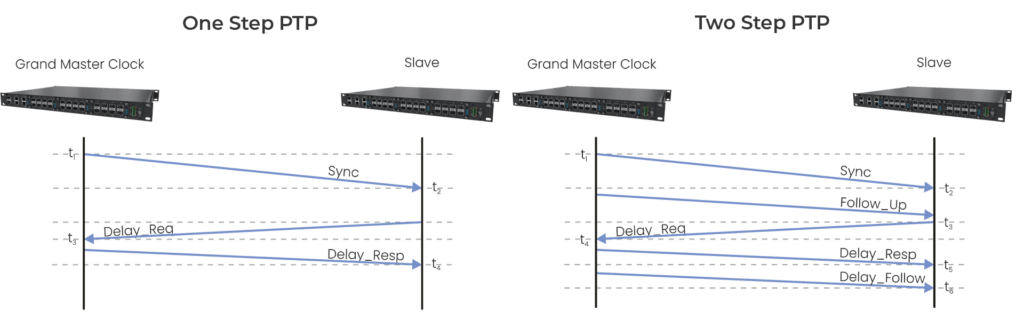
In general, the IEEE 1588v2 synchronization process consists of two steps.
– Establish a Master-Slave hierarchy: decide the role and state of each port of all Ordinary Clocks (OC) and Boundary Clocks (BC),
– Synchronization: the Grandmaster clock starts synchronizing the slave clocks.
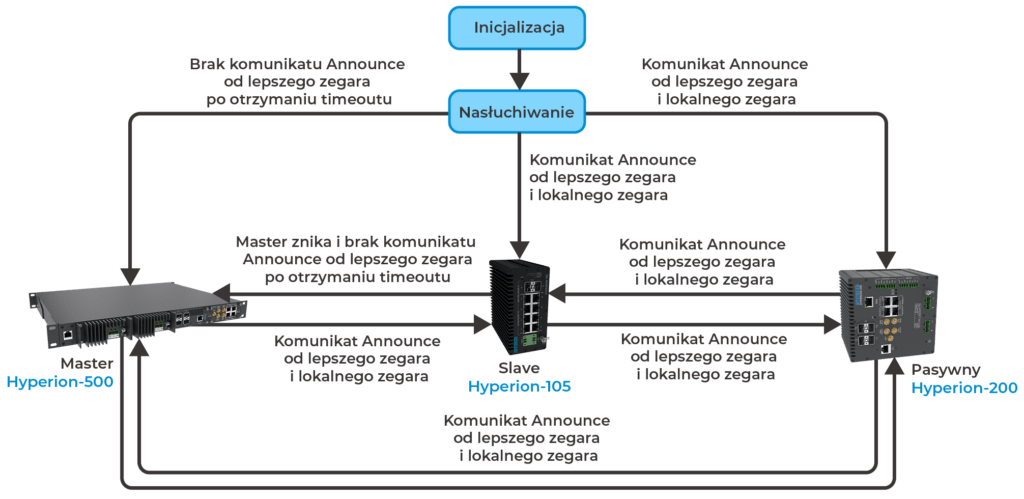
To establish a master-slave hierarchy, it is necessary to decide which node is the grandmaster clock for the entire system, which node is the master clock, and which node is the slave clock. The Best Master Clock Algorythm can establish the Master-Slave hierarchy by determining the state of each port (Master, Slave or Passive) on the OC or BC clock. Intermediate IEEE 1588v2 TCs (e.g., switches that support the 1588v2 standard) then measure the latency of 1588 messages sent from a port in the Master state to a port in the Slave state. This delay will then be used by the port in the slave state to adjust the local clock time.