

Un numero crescente di applicazioni di sicurezza e controllo delle sottostazioni sta iniziando a utilizzare Ethernet come canale di comunicazione principale. È quindi ragionevole supporre che Ethernet diventerà il principale mezzo di comunicazione per le future sottostazioni, non solo a livello di trasmissione, ma anche di servizi associati come la sincronizzazione temporale precisa.
Le stazioni digitali richiedono un'architettura di rete ottimizzata nel tempo che integri completamente tutti gli elementi del sistema di automazione IEC 61850. L'ottimizzazione del dominio del tempo è intesa come la criticità della latenza e delle fluttuazioni dei pacchetti, ma anche, e forse soprattutto, la capacità della rete di trasportare una sincronizzazione temporale precisa. Molte applicazioni IEC 61850 richiedono una sincronizzazione temporale di alta precisione e una ridondanza di comunicazione veloce, se non addirittura senza perdite, per funzionare correttamente e raggiungere il livello di affidabilità richiesto dal settore energetico.
Dati i costi e l'affidabilità dei sistemi di misura basati su ricevitori distribuiti di sistemi globali di navigazione satellitare (GNSS), è consigliabile che le unità di distribuzione utilizzino meno ricevitori GNSS distribuiti e optino per l'implementazione di sistemi di distribuzione del tempo centralizzati più affidabili e robusti, con diverse fonti di dati di ingresso e algoritmi di convalida. In questo modo si affronteranno le questioni della qualità della sincronizzazione temporale, della manutenzione della rete di sincronizzazione e della resistenza al jamming o allo spoofing. Supponendo che sia disponibile una fonte di tempo precisa e centralizzata, una distribuzione del tempo affidabile e accurata sarà essenziale per il corretto funzionamento delle applicazioni critiche di controllo e misurazione che richiedono una precisione di temporizzazione non inferiore a ±1 μs.
In termini di costi, complessità e affidabilità rispetto ai vari metodi di sincronizzazione temporale disponibili, il Precision Time Protocol (PTP) definito in IEEE1588 v2.1 è un buon candidato per risolvere i problemi di sincronizzazione nelle sottostazioni.
Questo articolo fornisce un'introduzione all'IEEE 1588 v2.1 e fornisce nozioni generali sulle problematiche applicative della sincronizzazione temporale di precisione. Vengono inoltre affrontati i requisiti generali per la precisione del tempo nelle applicazioni di sottostazione.
IEEE 1588 - Introduzione
L'attuale standard IEEE 1588 v2.1: 2019 (versione precedente IEEE1588 v.2.0:2008) definisce la seconda generazione del Precision Time Protocol, noto anche come PTPv2.1 o 1588v2.1. Lo standard PTP consente di ottenere una sincronizzazione temporale altamente accurata con i dispositivi Ethernet (in genere gli switch) attraverso l'elaborazione hardware-software di messaggi PTP e orari precisi. L'elaborazione hardware con il supporto del software può compensare l'incertezza introdotta dai sistemi operativi in tempo reale e altri ritardi creati durante il processo di sincronizzazione nei dispositivi di distribuzione della sincronizzazione e nei dispositivi sincronizzati. Il grande vantaggio della seconda versione del PTP è che non influisce sul funzionamento di altri protocolli in esecuzione sulla rete Ethernet e riduce il carico della CPU. Di conseguenza, è possibile distribuirlo con altri protocolli di stazione sensibili al tempo, come GOOSE (Generic Object Oriented Substation Event), SV (Sampled Values), PMU (Phasor Measurement Units) e altri protocolli di automazione delle stazioni. Nella costruzione delle stazioni è importante dotare gli switch Ethernet di un supporto hardware completo per il PTP insieme ai profili richiesti, cioè almeno il Power Profile - IEEE C37.238 e IEC 61850-9-3 disponibile solo sulla classe più alta di switch.
Il PTP supporta più Master Clock (MC), consentendo ai dispositivi di selezionare il miglior Grand Master Clock (GMC) attraverso il Best Master Clock Algorithm (BMCA). In caso di degrado della qualità dell'orologio selezionato come master, è possibile selezionare automaticamente un altro orologio in tempo reale che funga da nuovo GMC per il ricevitore con una precisione migliore del precedente fino a quando non riacquista la capacità di sincronizzazione al livello precedente.
Una delle caratteristiche principali del PTP è la sua flessibilità, in quanto può essere utilizzato per molte applicazioni di sincronizzazione temporale con una precisione inferiore a 1 μs.
Gli obiettivi del PTP sono:
- precisione al nanosecondo della distribuzione del tempo,
- ridurre al minimo le risorse della CPU a scapito del supporto hardware,
- implementazione di una sincronizzazione precisa nelle reti di dati,
- supporto di orologi con capacità diverse, come precisione, accuratezza e stabilità.
L'IEEE 1588 PTP è utilizzato in molti settori come le telecomunicazioni, l'automazione industriale, l'automazione delle stazioni, le reti audio e video, la borsa valori e progetti IoT specifici, tra gli altri. Uno dei vantaggi principali è che IEEE 1588 può essere distribuito via cavo ma anche via radio Ethernet: non richiede una rete di distribuzione del tempo aggiuntiva ed evita la necessità di installare decine o centinaia di ricevitori GNSS associati alle unità che richiedono un tempo di precisione. Allo stesso tempo, il PTP è più preciso del Network Time Protocol (NTP), in quanto è in grado di fornire una precisione al nanosecondo con il supporto della marcatura temporale hardware. È quindi ideale per le applicazioni basate su stazioni. La Tabella 1 riassume le caratteristiche dei diversi metodi di sincronizzazione attualmente disponibili per le sottostazioni.
Tabella 1: Confronto tra i diversi metodi di sincronizzazione temporale delle sottostazioni

Tipi di orologio
Per lo standard PTP sono stati definiti quattro tipi di dispositivi principali: Ordinary Clock (OC), Transparent Clock (TC) e Boundary Clock (BC), oltre al già citato Master Clock. Questi orologi lavorano insieme per distribuire messaggi di sincronizzazione altamente precisi in tutta la struttura temporale.
L'orologio slave ordinario (OSC) è un dispositivo di sincronizzazione temporale di precisione PTP. Mantiene una scala temporale nel dominio PTP e si sincronizza ad essa per l'ulteriore sincronizzazione dei circuiti interni dipendenti dall'applicazione. Per le applicazioni, può offrire una scala temporale sotto forma di marcatore e/o di segnale PPS (Pulse Per Second). L'imprecisione della sincronizzazione che l'OSC può offrire dipende dai circuiti interni e dalla classe dell'oscillatore locale. È possibile utilizzare Synchronous Ethernet per migliorare le prestazioni di sincronizzazione dell'oscillatore locale, se tale funzionalità è supportata.
Orologio trasparente (TC) I messaggi PTP nei sistemi di comunicazione vengono inviati attraverso switch e router con un certo ritardo. Il ruolo del TC è quello di misurare accuratamente il ritardo di commutazione e aggiungere questa informazione al messaggio PTP.
Gli switch TC possono essere configurati in due modi: TC End-to-End (E2E) o TC Peer-to-Peer (P2P), a seconda del meccanismo di misurazione del ritardo utilizzato. Se il timer funziona in modalità E2E, il tempo di sosta viene aggiunto al campo di correzione del messaggio PTP di destinazione. Il TC P2P, invece, comunica anche con il dispositivo a monte (lato MC) a cui invia i messaggi PTP Peer per ottenere informazioni sul ritardo della connessione, che vengono aggiunte ai campi di correzione insieme al tempo di permanenza dei pacchetti PTP. La modalità di calcolo del ritardo P2P è necessaria per le applicazioni delle stazioni nei profili richiesti. Non è possibile utilizzare apparecchiature di stazione intelligenti con la modalità E2E, che è definita nelle applicazioni di telecomunicazione, ad esempio nel profilo Telecom ITU-T G.8275.1. Nella scelta dell'hardware dedicato alle soluzioni di stazione, occorre quindi verificare attentamente le capacità PTP del dispositivo. La successiva correzione del meccanismo di calcolo del ritardo mediante sostituzione del software può rivelarsi complicata o impossibile senza sostituire l'hardware.
Il Boundary Clock (BC) è costituito da OSC e MC separati da circuiti interni di sincronizzazione di tempo e frequenza (circuiti oscillatori locali). L'insieme implementato nello switch di rete consente di rilevare automaticamente il lato degli orologi master e, attraverso l'algoritmo BMCA, di selezionare la sorgente migliore. Sulla porta dello switch designata dall'algoritmo BMCA, la funzione OSC viene impostata automaticamente e le altre porte configurano automaticamente la modalità MC. Di conseguenza, i BC dividono l'area di sincronizzazione in diversi segmenti o sottodomini, ognuno dei quali può avere impostazioni di configurazione in parte diverse. Come per i TC, il calcolo del ritardo può avvenire in modalità E2E e P2P. Per le applicazioni di stazione, è necessaria la modalità di calcolo del ritardo P2P. Quando si configurano le applicazioni BC e di stazione, occorre ricordare che è necessario il supporto di profili specifici, ad esempio IEEE C37.238 e IEC 61850-9-3.
Figura 1: Esempio di rete di sincronizzazione PTP basata su soluzioni Bitstream

Come mostrato nella Figura 1, la rete di sincronizzazione temporale può supportare qualsiasi topologia di connessione. Un meccanismo di selezione del miglior orologio garantirà che il percorso di sincronizzazione sia selezionato correttamente e che il percorso sia commutato sulla sorgente migliore. La struttura può essere a più livelli e includere collegamenti di trasmissione eterogenei (doppino, fibra ottica o radio WiFi). In assenza di un supporto diretto del protocollo PTP nei dispositivi finali, questi possono essere sincronizzati da dispositivi intermedi della catena PTP dotati di uscite appropriate, ad esempio PPS - sincronizzazione e orologio a 10MHz - sintonizzazione. Tale nodo deve svolgere il ruolo di OSC o BC per poter emettere i segnali appropriati. Un ruolo importante in una rete così estesa è svolto da un sistema di supervisione o di monitoraggio della qualità della sincronizzazione. Pertanto, se i time server e gli elementi dei nodi provengono da un unico produttore, saranno dotati di un sistema di configurazione e supervisione coerente, che faciliterà la manutenzione di tale infrastruttura.
La Figura 2 mostra il metodo di calcolo del ritardo per le configurazioni P2P richieste nelle reti di generazione di energia, automazione industriale o audio-video. Lo scambio di messaggi mostrato si riferisce alla modalità One Step, che sarà trattata più avanti in questo articolo.
Figura 2: Esempio di calcolo della latenza in modalità P2P (One Step)
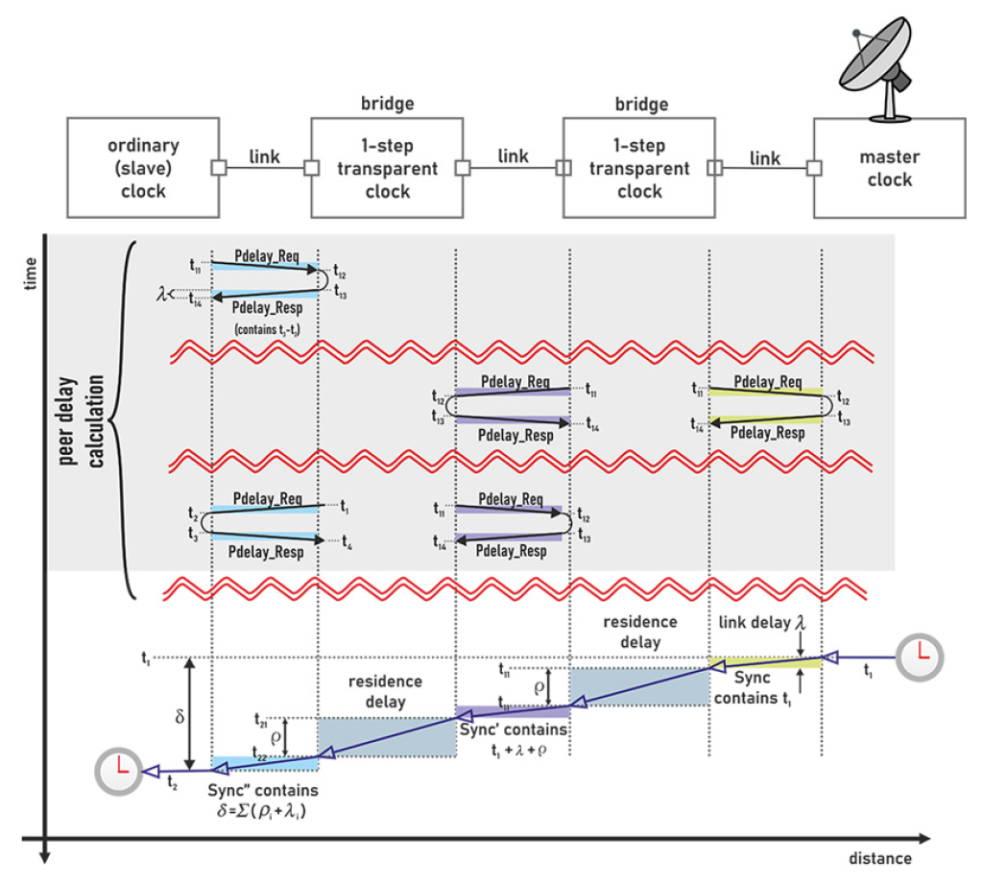
Come illustrato nella Figura 2, un messaggio Sync che trasporta un Precision Timestamp viene distribuito attraverso due nodi (switch) che operano in modalità TC. Ciascuno di essi, in base allo scambio di messaggi Pdelay_Req (Peer Delay Request) e Pdelay_Res (Peer Delay Response) tra i nodi, ha il compito di determinare il Link Delay. I dispositivi TC determinano anche il ritardo di propagazione Residence Delay. Ogni nodo include i ritardi calcolati nel messaggio SynC. Alla fine del processo, il ricevitore tiene conto del ritardo dell'ultima traccia.
Ricevitore e sincronizzazione di rete IEEE 1588v2
Descrivendo il processo di sincronizzazione della rete e dei dispositivi in generale attraverso il protocollo IEEE 1588 v2.1, esso si compone delle seguenti fasi:
1. Definizione della gerarchia Master-Slave: decisione del ruolo e dello stato di ciascuna porta di tutti i Boundary Clocks e Ordinary Clocks utilizzando il meccanismo BMCA.
2. Sincronizzazione: l'orologio Grandmaster inizia a sincronizzare gli orologi slave.
3. misurazione del ritardo per i nodi di rete configurati in modalità P2P o determinazione del ritardo tra master e slave in modalità E2E.
4. sincronizzazione dei nodi Boundary Clocks e Ordinary Slave Clocks.
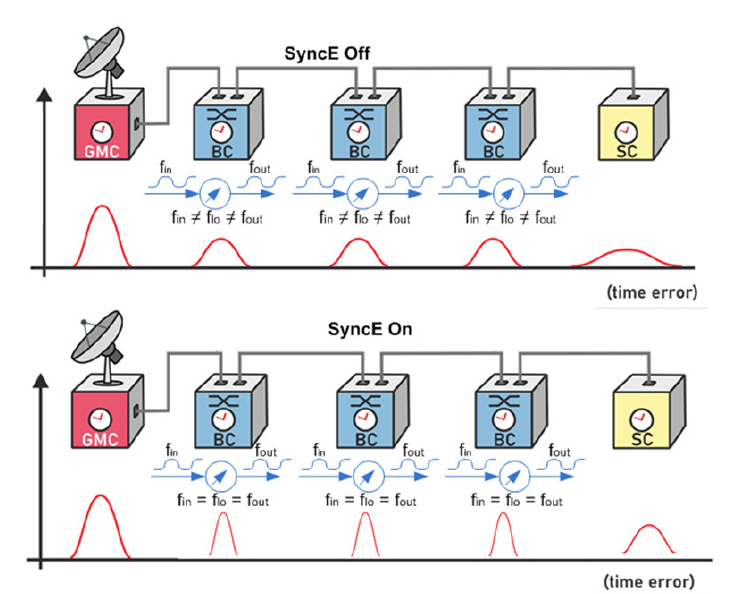
La sincronizzazione dei nodi OSC e BC avverrà per gradi. In genere, in questi dispositivi sono integrati circuiti di controllo automatico per sintonizzare la temporizzazione interna. Il regolatore tenta tipicamente di sintonizzare la frequenza e nella fase successiva si occupa della regolazione fine della fase (temporizzazione). A seconda delle impostazioni dei membri inerziali del regolatore, il tempo di sintonizzazione della fase può raggiungere diversi minuti. La sintonizzazione della fase sarà sensibile alle variazioni di frequenza dell'oscillatore locale, quindi è una parte importante del dispositivo OSC o BC. È possibile migliorare la sincronizzazione della temporizzazione PTP sincronizzando i circuiti di frequenza utilizzando Synchronous Ethernet (SyncE) specificato tramite ITU-T G.8261, ITU-T G.8262 e ITU-T G.8264, come mostrato nella Figura 3. In questo caso, la sincronizzazione della frequenza viene effettuata utilizzando il livello fisico Ethernet e il PTP si occupa della sintonizzazione di fase dell'OSC. La combinazione di questi due metodi è tipica delle reti di telecomunicazione mentre, per ragioni sconosciute, è meno comune nelle reti di automazione.
Figura 3: Utilizzo di Ethernet sincrono per migliorare le prestazioni dei dispositivi BC con PTP.
Algoritmo del miglior orologio master
Il BMCA è un algoritmo decisionale applicato a tutti i nodi che supportano la funzione di sincronizzazione dell'orologio, ossia che dispongono di un OSC. Una porta dell'Ordinary Slave Clock ha due possibili stati di base: Slave e per il BC Slave e Master. Naturalmente esistono molti altri stati che una porta di un dispositivo OSC o BC può assumere. Questi definiscono gli stati transitori o di emergenza. Tuttavia, a seconda delle impostazioni di configurazione e della decisione del BMCA in caso di disponibilità dell'orologio master, viene presa una decisione finale sullo stato della porta come tipo Slave ricevente o come tipo Master sincronizzante. I dispositivi TC non sincronizzano i circuiti interni e si limitano a trasmettere i messaggi PTP e a elaborare i timestamp per i messaggi selezionati, quindi non utilizzano l'algoritmo BMCA e non esistono stati della porta definiti come sopra.
L'orologio master con la temporizzazione definita per il profilo invia informazioni sulle proprietà dell'orologio alla rete tramite messaggi di annuncio. Il cambio del Master e l'inizializzazione del BMCA possono essere attivati dall'assenza di messaggi di annuncio dal Grandmaster esistente per un certo periodo di tempo. Il processo può anche essere attivato automaticamente quando il Master attivo si degrada (assenza di segnale GNSS) o quando un altro nodo con un orologio migliore viene collegato alla rete. BMCA utilizza i dati di Announce per decidere quale Master ha la migliore precisione o l'utente gli ha dato la massima priorità per essere selezionato come Grandmaster. I dati decisionali sono elencati di seguito, in ordine di priorità:
1. Priorità 1: è un'impostazione definita dall'utente che può essere configurata da 0 a 255. I valori più bassi hanno la priorità. È stata progettata per essere la più alta dell'elenco, in modo da bypassare il resto dei confronti BMCA e velocizzare l'esecuzione, oltre che per dare agli utenti libertà in termini di impostazioni dell'orologio.
2. ClockClass (lo stato di sincronizzazione con l'orologio atomico): Valore di ClockClass, che indica la capacità di tracciare il tempo o la frequenza o, in altre parole, lo stato dell'orologio. Un valore di 6 indica la sincronizzazione con il tempo atomico. Più alto è il valore, peggiore è la classe. Un valore ClockClass di255 è utilizzato per gli orologi slave che non si sincronizzano nella catena PTP dei dispositivi a valle.
3. Precisione dell'orologio: si tratta di un valore enumerato stimato dall'orologio in base all'attributo della fonte del tempo e alla capacità dell'orologio stesso di supportarlo.
4. Deviazione dell'orologio (offsetScaledLogVariance): È un valore statistico su scala logaritmica che rappresenta l'accuratezza del timestamp quando non è sincronizzato da PTP, in base all'algoritmo specificato in PTPv2 (BC).
5. Priorità 2: si tratta di un'altra impostazione di priorità da parte dell'utente, simile alla priorità 1. Se ci sono due orologi Grandmaster identici, questa impostazione può essere usata per selezionare il Master preferito.
6. Identificazione dell'orologio (GrandMasterID): il valore modificato dell'indirizzo MAC dell'orologio, che è un valore unico per ogni orologio sulla LAN.
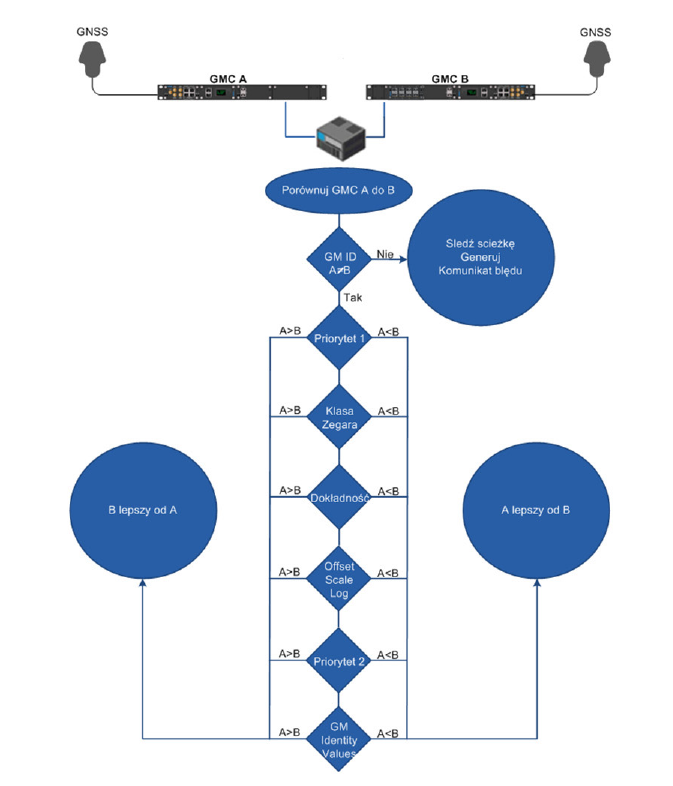
Può accadere che i messaggi provenienti dall'orologio Grand Master prendano strade diverse per raggiungere il dispositivo dell'orologio ordinario. In questo caso, l'algoritmo BMCA entra in modalità di determinazione del percorso di sincronizzazione e analizza una serie di altre informazioni per decidere lo stato della porta e il messaggio di errore. La Figura 4 mostra un algoritmo BMCA semplificato.
Figura 4: Metodo per la selezione di un clock BMCA migliore
Due passi e un passo
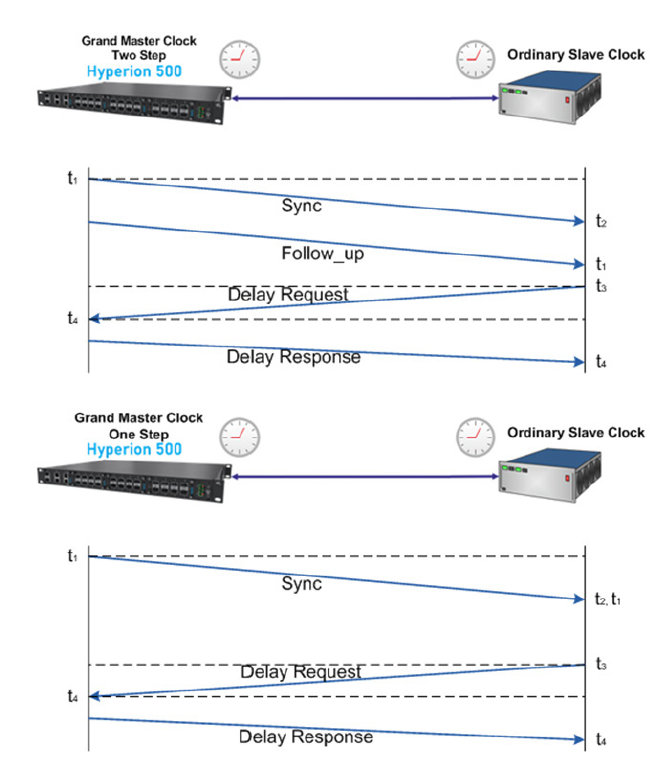
Per ogni tipo di nodo PTP sono stati definiti due metodi di trasmissione delle marche temporali, ovvero One Step e Two Step. La definizione di due metodi per l'invio di timestamp precisi deriva dallo sviluppo delle capacità hardware dei dispositivi di rete di supportare i messaggi PTP. Nelle prime soluzioni, la funzione di recupero dell'ora reale dai circuiti interni del dispositivo Master Clock durante la generazione dei frame di sincronizzazione contenenti il timestamp si è rivelata difficile da realizzare. Si è quindi deciso di aggiungere l'annuncio dell'ora tramite un meccanismo a due fasi. Quando si invia un frame di sincronizzazione con un timestamp, l'ora effettiva non viene aggiunta, ma solo inserita nel registro del dispositivo. Poi, con il messaggio Follow Up, il timestamp precedentemente memorizzato viene recuperato e inviato già nella modalità di un normale frame di trasmissione. Nel corso dello sviluppo dei dispositivi, la modalità One Step è già supportata nella maggior parte dei casi e può essere considerata come la modalità preferita e di destinazione. L'interoperabilità è garantita quando i dispositivi operano in entrambe le modalità. La Figura 5 mostra come vengono scambiati i messaggi in modalità One Step e Two Step. Per semplicità, viene presentata la modalità di calcolo del ritardo E2E. Anche per la modalità P2P, dopo il frame di sincronizzazione verrà inviato un messaggio di follow-up, mentre non ci saranno altri messaggi, che saranno sostituiti da messaggi Peer.
Figura 5: Calcolo dei ritardi a un passo e a due passi in modalità E2E
Profilo di alimentazione IEEE 1588
Nello standard PTPv2, i profili introdotti consentono una serie di opzioni per la loro configurazione. I profili definiscono alcune funzioni, indicandone l'uso specifico.
In primo luogo, per le applicazioni di potenza (soprattutto PMU) è stato creato il profilo IEEE Std C37.238-2011 Power Profile che, grazie a parametri ottimizzati e a una configurazione minima da parte dell'utente, consente di ottenere una precisione di sincronizzazione inferiore a 1 µs con topologie di rete tipiche dei sistemi di automazione delle sottostazioni. A questo è seguito un profilo denominato Utility Profile descritto nella norma IEC61850-9-3:2016. Subito dopo è stato semplificato il Power Profile ed è stato creato il documento IEEE Std C37.238-2017. I profili specificano le configurazioni del PTP, le modalità di determinazione dei ritardi e aggiungono campi TLV specifici. L'assenza di questi campi nei messaggi PTP significa che i PTP non sono interoperabili con le apparecchiature di automazione delle stazioni.
La Management Information Base (MIB) per il Simple Network Management Protocol (SNMP) per il PTP Power Profile è anch'essa definita nei documenti di standardizzazione del profilo e consente di monitorare i parametri chiave del dispositivo utilizzando strumenti standard di gestione della rete.
Il Power Profile definisce i requisiti per gli switch Ethernet che possono introdurre un'imprecisione non superiore a 50ns in modalità TC e 200ns in modalità BC. Per l'OSC si assume un valore di imprecisione non superiore a 200ns. Il dispositivo MC deve offrire una precisione migliore di 200ns.
I profili utilizzati nel settore dell'energia richiedono l'uso di switch in modalità PTP Peer-to-Peer per trasportare tutti i messaggi PTP sulla rete Ethernet e che tutti i messaggi siano trasmessi utilizzando frame di broadcast Ethernet al livello 2 del modello OSI/ISO. L'ipotesi del metodo di determinazione del ritardo comporta i seguenti vantaggi:
- Il traffico e il carico diretto all'orologio master sulla rete non aumenta con l'aggiunta di altri dispositivi OSC. Il Grand Master comunica solo con lo switch Ethernet a cui è collegato.
- Il sistema PTP tiene automaticamente conto dei ritardi calcolati per ogni connessione, quando la connessione di rete primaria si interrompe e viene utilizzato un percorso alternativo. I ritardi del percorso sono misurati su tutti i collegamenti di rete, anche quelli bloccati al traffico normale, ad esempio dai protocolli SpanningTree, ITU-T G8032, ecc.
- Possibilità di tracciare sui dispositivi (anche sui TC) lo stato dei collegamenti e i relativi ritardi.
Vantaggi dell'uso del PTP
In base allo schema tecnologico presentato, l'uso del PTP per distribuire l'ora da server temporali GMC accurati e centralizzati situati nelle sottostazioni su applicazioni distribuite di ricevitori GNSS locali presenta i seguenti vantaggi:
1. La distribuzione dei dati e la sincronizzazione temporale avvengono sulla stessa rete Ethernet.
2. La precisione della sincronizzazione non è influenzata dal traffico Ethernet. Solo se la rete è sovraccarica o riconfigurata, i messaggi PTP possono andare persi. Questa situazione può essere evitata utilizzando switch Ethernet con interfacce da 10Gbit/s nella progettazione dell'architettura. In questo modo si risparmia sul budget e si può utilizzare una rete con una sincronizzazione precisa per trasmettere dati di propagazione sensibili al tempo dal bus di processo IEC 61850, come PMU, GOOSE o SV.
3. Il PTP offre la possibilità di utilizzare orologi Grandmaster ridondanti con failover automatico.
4. Grazie alla configurazione P2P, la rete può essere ampliata senza sovraccaricare il Grandmaster.
5. I ritardi di propagazione dovuti a lunghe tratte di cavo vengono compensati automaticamente. La calibrazione dei nodi e dei dispositivi sul campo non deve essere effettuata manualmente.
6. nel PTP Power Profile, la frequenza dei messaggi (circa ogni 1s) è stata ottimizzata per soddisfare i requisiti di una precisione migliore di 1 µs, senza causare un traffico eccessivo nella rete condivisa.
7. Non ci sono problemi di configurazione per quanto riguarda il tempo universale coordinato (UTC) o l'ora locale. Viene utilizzato un unico riferimento temporale in modo che tutti i dispositivi OSC sulla stazione e fuori dalla stazione utilizzino il Tempo Atomico Internazionale (TAI), evitando, tra l'altro, problemi di cambio dell'ora.
8. Il PTPv2 può essere trasmesso sia su fibra che su doppino Ethernet, o anche su reti radio.
9. Il PTP trasmette un offset dell'ora locale, quindi non è necessario configurare un fuso orario locale sui relè di sicurezza.
10. Le modifiche alle date dell'ora legale devono essere apportate solo al Grandmaster e non a tutti i dispositivi della rete. Il meccanismo utilizzato è definito nella norma IEEE C37.238-2011/2017 e nel Profilo di utilità.
11. Per aumentare l'affidabilità delle connessioni di rete tra i dispositivi PTP è possibile utilizzare i protocolli che consentono connessioni Ethernet ridondanti, come RSTP, ITU-TG.8032 Parallel Redundancy Protocol (PRP) e High-availability Seamless Redundancy (HSR).
Krzysztof Nowacki, M.Sc.
Direttore Ricerca e Sviluppo
Bitsream S.A
www.bitstream.pl
Letteratura:
1. IEEE 1588 v2.1:2019 - IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems
2. IEEE Std C37.238™-2017, IEEE Standard Profile for Use of IEEE 1588™ Precision Time Protocol in Power System Applications
3. IEC TR 61850-90-12 :2020 Communication networks and systems for power utility automation - Part 90-12: Wide area network engineering guidelines
4. IEC TR 61850-90-5:2012 Communication networks and systems for power utility automation - Part 90-5: Use of IEC 61850 to transmit synchrophasor information according to IEEE C37.118
5. Practical aspects of IEC 61850-9-2 implementation in microprocessor-based protection and control IEDs
6. IEC 61850-9-2 LE (Lite Edition). Implementation Guideline for Digital Interface to Instrument Transformers using IEC 61850-9-2.
7. IEC 62439-3 (International Standard). Industrial Communication Networks – High Availability Automation Networks – Part 3: Parallel Redundancy Protocol (PRP) and High-availability Seamless Redundancy (HSR).
8. A. Carta, N. Locci, C. Muscas, F. Pinna, and S. Sulis, "GPS and 1588 synchronization for the measurement of synchrophasors in electric power systems," Computer Standards & Interfaces, vol. 33, no. 2, pp. 176-181, February 2011.
9. K. Behrendt and K. Fodero, "The Perfect Time: An Examination of Time Synchronization Techniques," SEL Inc., TP6226-01,








